Электротехника. IV. Электрические машины. История развития электрических машин
Электротехника. IV. Электрические машины. История развития электрических машин. В 1831 г. Фарадеем был открыт принцип электромагнитной индукции, на котором основано устройство всех электрических машин. Первые источники тока обладали подковообразными стальными магнитами, относительно которых с помощью постороннего двигателя вращался железный «якорь», снабженный обмоткой из медной проволоки. Первое техническое применение таких так называемых «магнитоэлектрических» машин имело место в 1857 г. в Брюсселе, где Ноллет и ван-Малдерен оборудовали установку для освещения сигнальных башен. Ток, даваемый этими машинами, был переменный. Существенное улучшение в конструкцию магнитоэлектрических машин внес Вернер Сименс в 1856 г. благодаря изобретенному им якорю, имеющему форму двойного Т и состоящему из продолговатого железного цилиндра с двумя глубокими продольными впадинами для укладки проводников. Якорь вращался между полюсами нескольких плоских подковообразных магнитов. Такие машины и до настоящего времени сохранили свое значение в качестве источников слабого переменного тока (индукторы в телеграфии, магнето для двигателей внутреннего сгорания). Дальнейшим усовершенствованием явилось устройство пластинчатого коллектора для выпрямления индуктируемого в якоре переменного тока в постоянный. Первая обмотка с коллектором, так называемая кольцевая, была предложена Пачинотти в 1860 г., но вскоре это изобретение было забыто. Сименс показал, что электрическая машина обладает свойством обратимости, т. е. при питании ее током от постороннего источника она становится способной совершать механическую работу в качестве двигателя. В 1867 г. тот же Сименс построил динамоэлектрическую машину, которая в отличие от магнитоэлектрической имела не постоянные магниты, а электромагниты, возбуждаемые током самой же машины (принцип самовозбуждения). В 1870 г. Грамм вторично изобрел кольцевую обмотку с коллектором. В 1872 г. конструктор фирмы Сименс и Гальске, Гефнер-Альтенек, предложил вместо кольцевого барабанный якорь, у которого проводники располагались лишь на наружной поверхности и который применяется и в настоящее время. Дальнейшим крупным шагом было изобретение в 1885 г. Циперновским, Дери и Блати трансформатора, служащего для преобразования переменного тока одного напряжения: в переменный же ток другого напряжения. В 1891 г. Доливо-Добровольским был создан трехфазный асинхронный двигатель, основанный на принципе вращающегося магнитного поля, открытом Феррарисом и Тесла: в 1888 г. С начала нынешнего столетия широко развивается применение для привода электрических машин паровой турбины, и возникает особый тип быстроходной электрической машины, так называемый турбогенератор. Дальнейший прогресс в области электромашиностроения сводился к установлению точной теории, методов расчета, повышению мощности отдельных единиц, повышению мощности, приходящейся, на единицу веса, повышению рабочего напряжения и наиболее рациональным конструкциям.
Классификация электрических машин. По назначению все электрические машины можно разделить на: генераторы электрической энергии (преобразующие механическую энергию в электрическую), электродвигатели (преобразующие электрическую энергию в механическую) и преобразователи (преобразующие электрическую энергию одного вида в электрическую же энергию другого вида). Такая классификация, однако, не всегда удобна, т. к. к одному и тому же типу здесь относятся машины совершенно различного устройства. Поэтому более удобным является разделение электрических машин по принципу устройства на машины постоянного тока и машины переменного тока, причем последние, в свою очередь, разделяются на: синхронные машины, трансформаторы, асинхронные машины, коллекторные машины и вращающиеся преобразователи. К электрическим машинам обычно относят и ртутные выпрямители, хотя они не основаны, на принципе «электромагнитной индукции».
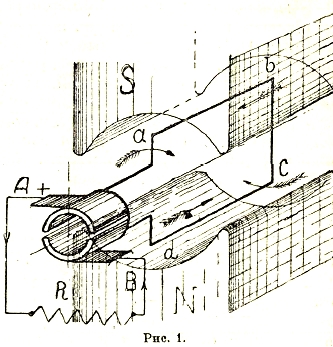
Рис. 1.
Основные принципы устройства электрических машин. Машины постоянного тока. Схематическое устройство простейшей машины постоянного тока показано на рис. 1. Между полюсами NS магнита (или электромагнита) вращается проволочная рамка abcd, концы которой присоединены к двум полукольцам (коллектору). К полукольцам прижимаются две «щетки» А, В, служащие для отвода тока во внешнюю цепь R. При вращении рамки, в ее сторонах аb и cd, по закону электромагнитной индукции, наводятся электродвижущие силы (эдс), которые в данный момент времени при данном расположении полюсов и данном направлении вращения (по часовой стрелке) направлены, как показано стрелками, т. е. от d к с и от b к а. Так как эти эдс действуют в одну и ту же сторону (в направлении от d к а), то, сложившись, они установят во внешней цепи ток, идущий от щетки А в сопротивление R и возвращающийся через щетку В обратно в рамку. Через полоборота, когда сторона cd станет под южным полюсом (S), а сторона аb под северным (N), эдс изменят свое направление на обратное. Так как, однако, теперь верхнее полукольцо перешло вниз, а нижнее — вверх, то ток во внешней цепи не изменит своего направления и будет продолжать идти от щетки А к щетке В. При дальнейшем полуобороте мы снова получим ту же картину, что на рис. 1. Таким образом, данное устройство обладает способностью устанавливать во внешней цепи ток постоянного направления, т. е. постоянный ток. Отметим, что в моменты времени, когда стороны аb и cd находятся между полюсами (например, через ¼ оборота после положения, показанного на рис. 1), эдс, наводимые в рамке, равны 0, т. к. при этом стороны рамки не перерезывают силовых линий. В этот момент и происходит переход щеток с одного полукольца на другое (т. н. коммутация тока). Очевидно, что ток во внешней цепи не будет сохранять свою величину неизменной за весь поворот рамки, а будет иметь пульсирующий характер, изменяясь от 0 до некоторого максимума. Величина эдс, индуктируемой в рамке, определяется формулой Е=ВІv 10-8 вольт, где В — магнитная индукция, l — длина подвергающегося индукции проводника (в данном случае аb + cd) и v —линейная скорость движения рамки. Сила тока в сопротивлении R определяется формулой Ома:
где R — сопротивление внешней цепи, а r — сопротивление внутренней цепи, т. е. самой рамки и контакта коллектор-щетки. Из последней формулы следует: IR + Ir = Е или
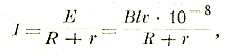
здесь Ir называется падением напряжения в машине, а V = Е - Ir — напряжением на внешних зажимах, или, просто, напряжением на зажимах машины. Устройство, показанное на рис. 1, не позволяет получить сколько-нибудь значительной эдс, и поэтому на практике прибегают к следующим мерам: подвергаемые индуктированию проводники располагают на железном цилиндре (якоре), вращающемся между полюсами, т. е. уменьшают магнитное сопротивление между полюсами; увеличивают длину провода, для чего берут не одну рамку, а несколько. На рис. 2 показан якорь с 4 рамками, из которых каждая для еще большего увеличения длины провода состоит не из одного, а из нескольких витков проволоки. Коллектор здесь также состоит не из двух полуколец, а из 4 сегментов (по числу рамок). Помимо увеличения эдс, такая конструкция дает возможность получить значительно меньшие колебания тока. На практике число рамок берут еще большим (часто несколько сотен), и при этом колебания тока практически становятся равными нулю. Современные электрические машины постоянного тока устраиваются обычно не двухполюсными, как показано на рис. 1, а четырех- и т. д. полюсными, причем электромагниты их питаются током, вырабатываемым самой машиной. Совокупность проволочных рамок называется обмоткой якоря. Для более надежного укрепления обмотки, а также для возможного уменьшения магнитного сопротивления между полюсами и якорем обмотка укладывается во впадины, имеющиеся на поверхности якоря. Совокупность всех железных частей машины, через которые проходит магнитный поток, называется магнитной цепью, или магнитопроводом. Типичный магнитопровод многополюсной (четырехполюсной) машины показан на рис. 3.
Рис. 2
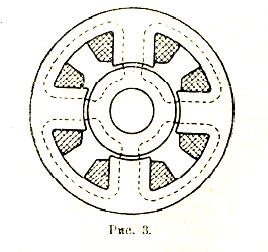
Рис. 3
Неподвижную часть машины (полюса и ярмо) называют еще индуктором. Пунктиром показаны пути прохождения магнитных силовых линий. Разрез якоря с впадинами показан на рис. 4. Коллектор состоит из отдельных медных сегментов, изолированных друг от друга слюдяными прослойками и собранных в виде цилиндра. Токособирательные щетки в современных машинах изготовляются из угля и располагаются в особых щеткодержателях, укрепленных на общей траверзе.
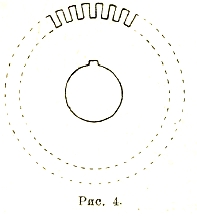
Рис. 4
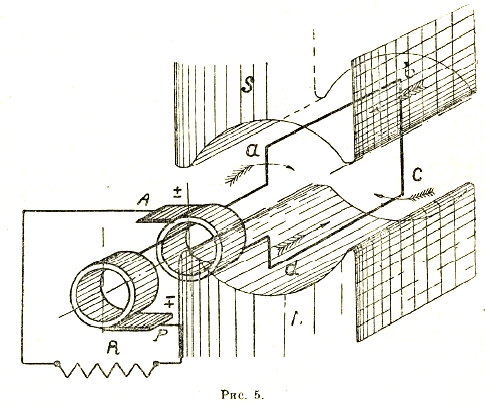
Рис. 5
Синхронные машины. Если в конструкции, показанной на рис. 1, заменить оба полукольца (коллектор) двумя отдельными кольцами, к которым присоединены концы рамки (рис. 5) и на которые по-прежнему наложены две неподвижные щетки, отводящие ток во внешнюю цепь, то мы получим простейшую машину переменного тока. В момент времени, показанный на чертеже, ток из рамки поступает в щетку В и, пройдя внешнюю цепь В, через щетку А возвращается в рамку. Через пол оборота сторона cd переместится в положение аb, и теперь ток будет идти во внешнюю цепь уже через щетку А, а возвращаться через В, т. е. направление тока в цепи изменится на обратное. В моменты времени, когда стороны аb и cd будут расположены между полюсами, в них не будут наводиться эдс, а, следовательно, и сила тока во внешней цепи (если она представляет собой чисто омическое сопротивление) будет равна 0. Таким образом, за время одного оборота рамки эдс будет от 0 увеличиваться до положительного максимума, снова падать до 0, опять увеличиваться до максимума, но уже отрицательного, и, наконец, снова принимать нулевое значение. Другими словами, за один оборот рамки будет иметь место один период изменения эдс (и тока). Если бы число полюсов нашей машины было равно 4, 6...2р, то число периодов за один оборот было равно 2, 3… р. Если рамка совершает в одну секунду n/60 оборотов, где n — число оборотов в минуту, то частота вырабатываемого машиной переменного тока, т. е. число периодов в секунду,
f=pn/60
где р — число пар полюсов машины. Отсюда очевидно, что, желая получить переменный ток постоянной частоты (в Европе стандартизована частота f = 50 пер/сек, а в Америке f = 60 пер/сек), мы должны вращать машину со строго постоянной скоростью, определяемой приведенной выше формулой (отсюда и наименование «синхронная машина»). При наименьшем возможном числе пар полюсов р = 1 и частоте f = 50 пер/сек, скорость вращения составляет 3 000 об/мин. Подобно машине постоянного тока, синхронные машины в техническом выполнении также снабжаются якорем и обмоткой, состоящей из многих проводников, уложенных во впадины этого якоря. Очертания полюсов и расположение проводов подбираются так, чтобы создаваемая машиной эдс имела синусоидальный характер изменения (см. теоретические основы электротехники). Если на якоре устроить не одну обмотку, а три самостоятельных обмотки, занимающих тельное перемещение проводников и каждая 2/3 полюсного деления (т. е. силовых линий. Подобная синхронная расстояния между серединами двух смежных полюсов), то мы получим трехфазную машину, создающую трехфазный ток. Если концы всех трех обмоток (фаз) соединить вместе, а начала подвести к трем кольцам, то получится соединение звездой (рис. 6). Если конец каждой фазы присоединить к началу следующей и точки соединения отвести к трем кольцам, то получится соединение треугольником (рис. 7).
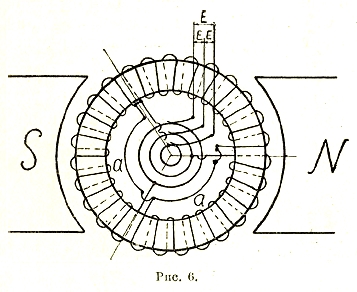
Рис. 6
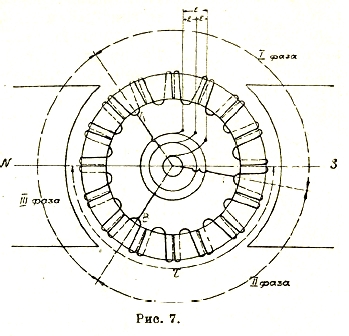
Рис. 7
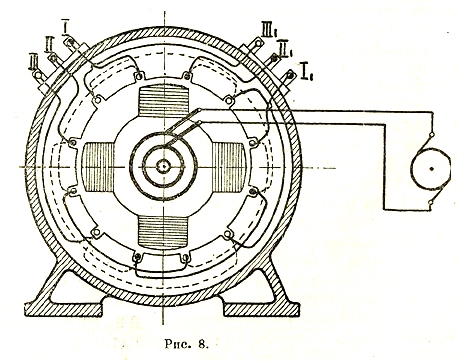
Рис. 8
Подобным же образом можно осуществить четырех-, шести- и т. д. фазную машину. На практике преимущественное распространение получил трехфазный ток, и поэтому синхронные машины почти исключительно выполняются трехфазными. В настоящее время, по целому ряду соображений, в синхронных машинах неподвижным устраивают якорь, представляющий в этом случае железное кольцо, на внутренней поверхности которого расположены во впадинах проводники. Индуктор, т. е. совокупность полюсов и соединяющего их ярма, вращается при этом внутри якоря. Никакого принципиального различия между такими машинами нет, так как по существу дела для получения индуктированной эдс необходимо лишь относительное перемещение проводников и силовых линий. Подобная синхронная машина трехфазного тока показана на рис. 8. Здесь на валу машины имеется два кольца для подведения постоянного тока (от постороннего источника) к обмоткам электромагнитов. Зажимы (концы) обмотки якоря являются здесь неподвижными. На рис. 8 выведены все 6 концов обмотки (по два на каждую фазу) для возможности соединения их либо в звезду, либо в треугольник. Питание обмоток электромагнитов (возбуждение) происходит обычно от небольшой машины постоянного тока, сидящей на одном валу с индуктором главной машины. В очень быстроходных машинах большой мощности (турбогенераторах) с целью увеличения механической прочности индуктор устраивают в виде цилиндра с впадинами, в которые закладывается обмотка возбуждения. Разрез такой машины показан на рис. 9. Неподвижный якорь синхронных машин часто называют статором, а вращающийся индуктор — ротором. Машины по типу рис. 8 имеют ротор с ясно-выраженными или выступающими полюсами, а машины по типу рис. 9 имеют ротор с неясно-выраженными полюсами или с распределенной обмоткой возбуждения.
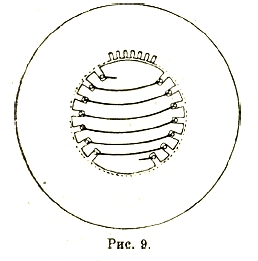
Рис. 9
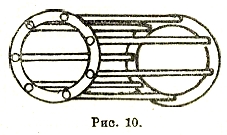
Рис. 10
Асинхронные машины. Поместим вовнутрь обычного трехфазного статора синхронной машины ротор, показанный на рис. 10 и состоящий из ряда медных стержней, соединенных по бокам медными кольцами. Вся эта конструкция расположена на железном цилиндре, так что стержни утоплены во впадинах, а кольца расположены по торцам цилиндра. Такой ротор называют часто ротором в виде беличьего колеса. Если теперь к обмотке статора подвести трехфазный переменный ток, то, как известно, внутри машины возникнет вращающееся магнитное поле (см. теоретические основы электротехники). Это поле, пересекая обмотку ротора, создаст в ней ток, который, взаимодействуя с полем, вызовет, по закону Био-Савара, вращение ротора, в результате чего получится электродвигатель, способный совершать механическую работу. Очевидно, что скорость вращения ротора никогда не сможет стать равной скорости вращения ноля, т. к. в противном случае ротор и поле находились бы во взаимном покое, никакого пересечения проводниками силовых линий не было бы, а, следовательно, исчезла бы причина, заставляющая ротор вращаться. Таким образом, скорость вращения ротора всегда меньше скорости вращения поля, определяемой уже знакомой нам формулой:
n = 60f/p
т. е. ротор вращается асинхронно (не синхронно) с полем, откуда произошло и название машины. Разница между скоростями поля и ротора называется скольжением последнего. Величина скольжения увеличивается с нагрузкой машины, т. е. скорость вращения при нагрузке уменьшается. Впрочем, разница между скольжением при нагрузке и скольжением при холостом ходе невелика и у современных машин составляет лишь несколько процентов. Как мы увидим впоследствии, в некоторых случаях необходимо бывает на некоторый промежуток времени увеличивать сопротивление ротора. Для этой цели роторные обмотки асинхронных машин часто устраивают так же, как и статорные, т. е. в виде трехфазной обмотки, концы фаз которой подведены к трем сидящим на валу и изолированным друг от друга кольцам. Тогда при посредстве трех неподвижных щеток можно присоединять к ротору добавочное сопротивление любой величины (реостат). При ненадобности в добавочном сопротивлении, щетки замыкают между собой накоротко, при помощи особого рычага. Подобные роторы называются фазовыми, или роторами с контактными кольцами. Разрез через статор и ротор асинхронной машины показан на рис. 11.
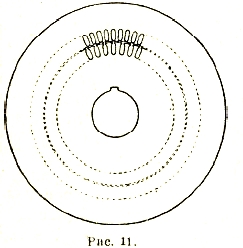
Рис. 11
Коллекторные машины переменного тока. Эти машины отличаются большим многообразием, и принципы устройства и работы их основных типов будут изложены при рассмотрении их теории.
Вращающиеся преобразователи. Простейшими вращающимися преобразователями являются мотор-генераторы, состоящие из двух связанных между собой непосредственно или с помощью зубчатой или иной передачи машин: электродвигателя (например, асинхронного) и генератора (например, постоянного тока). В этом случае, подводя к двигателю переменный ток, мы заставляем его вращать генератор, вырабатывающий постоянный ток (или наоборот). Можно, однако, объединить обе машины в одну, и тогда мы получим одноякорный преобразователь, схематическое устройство которого показано на рис. 12. Из чертежа видно, что здесь между двумя электромагнитами вращается якорь, обмотка которого, с одной стороны (слева), присоединена к трем кольцам, а с другой стороны (справа) — к коллектору. Если подвести постоянный ток к коллектору, то якорь придет во вращение и на кольцах появится напряжение переменного тока, т. е. мы получим совмещение в одной машине двигателя постоянного тока и синхронного генератора. Подводя к кольцам переменный ток и снимая с коллектора постоянный, мы получаем совокупность синхронного двигателя и генератора постоянного тока.
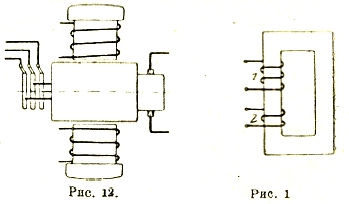
Рис. 12. Рис. 13
Трансформаторы. Преобразование переменного тока одного напряжения в переменный ток той же частоты, но иного напряжения может происходить с помощью трансформатора. На железном сердечнике (рис. 13) находятся, в случае однофазного трансформатора, две обмотки: первичная (1), с числом витков w1, и вторичная (2), с числом витков w2. Если присоединить первичную обмотку к сети переменного тока с напряжением V1 то, по закону электромагнитной индукции, в любой момент времени
v1 = -w1 dФ/dt
где v1 — мгновенное значение напряжения сети, Ф — магнитный поток в сердечнике, устанавливаемый током, протекающим по обмотке. Это уравнение строго справедливо при холостом ходе, когда потерей напряжения в обмотках можно пренебречь. Т. к. вторичная обмотка пронизывается почти тем же потоком, что и первичная, то при холостом ходе на зажимах вторичной обмотки появится напряжение
v2 = -w2 dФ/dt
Разделив первое уравнение на второе, найдем, что
v1/v2 = V1/V2 = w1/w2 = u,
т. е. напряжения на зажимах обмоток относятся как числа витков этих обмоток. Отношение w1/w2 = u называется коэффициентом трансформации, или передаточным числом трансформатора. При нагрузке вторичной цепи в обмотках возникают падения напряжения, благодаря чему отношение напряжений несколько (хотя и очень мало) изменяется. Для преобразования многофазных токов можно взять несколько (по числу фаз) однофазных трансформаторов и соединить их обмотки в звезду или многоугольник. Однако, в большинстве случаев, многофазные трансформаторы устраивают так, как показано на рис. 14, т. е. обмотки всех фаз (в данном случае трех) располагают на общем сердечнике.
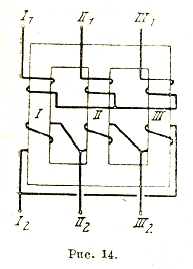
Рис. 14.
Ртутные выпрямители. Устройство ртутных выпрямителей основано на принципе выпрямляющего свойства вольтовой дуги (см. теоретические основы электротехники). Эти аппараты служат для преобразования переменного тока в постоянный и в последнее время являются серьезными конкурентами вращающихся преобразователей.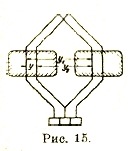
Рис. 15
Обмотки электрических машин. Обмотки машин постоянного тока состоят из ряда витков, соединенных друг с другом и с сегментами (пластинами) коллектора. На практике витки укладываются во впадины, но мы первоначально, для более наглядного изображения, будем представлять их расположенными на поверхности якоря. Для того, чтобы в витке индуктировалась наибольшая эдс, его ширину берут, по возможности, равной полюсному делению (т. е. расстоянию между серединами смежных полюсов, измеренному на поверхности якоря). Существует два типа обмоток: петлевая и волновая.
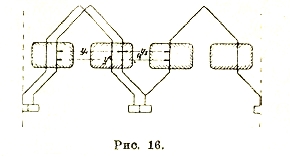
Рис. 16.
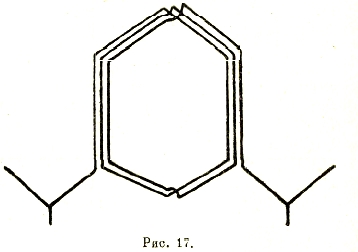
Рис. 17.
На рис. 15 показана часть петлевой обмотки (поверхность якоря развернута в плоскость). Здесь имеется два витка, соединенных последовательно, причем, как видно из чертежа, второй виток лежит под теми же двумя полюсами, что и первый. На рис. 16 показана часть волновой обмотки. Здесь последовательно соединенные витки лежат под разными полюсами. Часть обмотки, лежащая между двумя коллекторными пластинами, следующими друг за другом при обходе обмотки, называется элементом, или секцией. На рис. 15 и 16 каждая секция состоит из одного витка, но она может состоять и из нескольких, как показано на рис. 17 для волновой обмотки (здесь секция состоит из трех витков). Каждая сторона секции называется активной стороной. Расстояние между начальными сторонами двух секций, следующих друг за другом при обходе обмотки, называется результирующим шагом у (см. рис. 15 и 16). Кроме того, в обмотке различают еще: первый частичный шаг у1 равный расстоянию между начальной и конечной сторонами одной и той же секции, и второй частичный шаг у2, равный расстоянию между конечной стороной одной секции и начальной стороной другой.
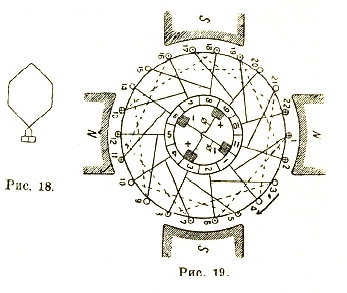
Рис. 18. Рис. 19
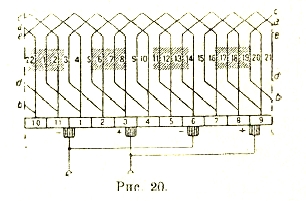
Рис. 20
Из рис. 15 и 16 следует, что в петлевой обмотке частичные шаги делают в разные стороны и у = у1 — у2, а в волновой обмотке их делают в одну сторону и у = у1 + у2. Шаги измеряются не единицами длины, а числом пропущенных промежутков между активными сторонами, так как важно знать не абсолютное расстояние (см, мм...), а с каким проводником следует соединить тот или иной проводник обмотки. Кроме обмоточных шагов, для выполнения обмотки необходимо знать шаг по коллектору ук, указывающий расстояние между коллекторными пластинами, к которым присоединены концы одной секции. Шаг по коллектору измеряется числом пропущенных изоляционных прослоек между пластинами. Число секций обмотки равно числу коллекторных пластин, т. к. конец одной секции и начало следующей присоединены к одной и той же пластине. Если N — число проводников обмотки, S — число активных сторон и если активная сторона секции состоит из одного проводника, то S = N, если же она состоит из W проводников, то S=N/W. Так как секция состоит из двух активных сторон, а число секций равно числу коллекторных пластин К, то S = 2К. Число активных сторон очевидно должно быть четным, а число коллекторных пластин может быть четным и нечетным. Отметим, что для всех барабанных обмоток результирующий шаг у всегда вдвое больше шага по коллектору ук, т. е. у = 2ук. Петлевые, иначе параллельные, обмотки делятся на простые и многократные. В простой петлевой обмотке результирующий шаг всегда равен 2, т. е. у = ±2 и, следовательно, шаг по коллектору ук = ± 1. Шаги у и ук получаются отрицательными в том случае, если у2>у1. Обмотки с отрицательными у и ук называются перекрещенными. На рис. 18 показана секция перекрещенной обмотки. Четырехполюсная петлевая обмотка показана на рис. 19, а на рис. 20 дана ее развернутая схема. Данные этой обмотки: S—N =22; К = 11; у1 = 5; у2 = 3, у = + 2; уk = +1. В простых петлевых обмотках число параллельных ветвей всегда равно числу полюсов, т. е. 2р = 2а, где 2р — число полюсов, а 2а — число параллельных ветвей. При данном положении щеток мы имеем следующие параллельные ветви: 1) левая отрицательная щетка; пластина 11, проводники 2, 19, 22, 17, пластина 4, левая положительная щетка; 2) левая отрицательная щетка, пластина 1, проводники 1, 6, 3, 8, пластина 3, левая положительная щетка; 3) правая отрицательная щетка, пластина 6, проводники 11, 16, 13, 18, пластина 8, правая положительная щетка; 4) правая отрицательная щетка, пластина 6, проводники 14, 9, 12, 7, пластина 9, правая положительная щетка. Проводники 15—20, 5—10 и 4—21 замкнуты щетками накоротко и в образовании эдс не участвуют (в данный момент времени). Частичные шаги обмотки должны всегда выражаться нечетными числами. Так как у = 2, а у1—у2=у, то для того чтобы разность у1—у2 была равна четному числу, у1 и у2 должны быть или оба четными, или оба нечетными. При четных частичных шагах мы обошли бы, однако, только четные активные стороны, если бы начали с нечетной, или, наоборот, только нечетные, если бы начали с четной стороны. Поэтому у1 и у2 должны быть обязательно нечетными. Первый частичный шаг, равный ширине секции, должен быть близок к полюсному делению или равняться ему, для того чтобы эдс, индуктируемая в секции, имела наибольшую возможную величину. Если выразить полюсное деление числом промежутков между активными сторонами, то оно S/2p, следовательно S
![]()
Обычно пишут
![]()
где b — произвольное число (обычно наименьшее), делающее целым и нечетным. Если S при делении на 2р дает целое нечетное число и если мы берем y1 = S/2P, то обмотка в этом случае называется диаметральной. Тогда, очевидно, b=0. Если же b не равно нулю, то обмотка называется хордовой. Эти названия были даны обмоткам применительно к двухполюсным машинам, у которых в первом случае стороны секции располагаются по концам диаметра якоря, а во втором случае — по концам хорды. Если обозначить общий ток, проходящий через якорь, через Іа, то ток в одной параллельной ветви обмотки будет iа = Ia/2a = Ia/2p (т. к. для простой петлевой обмотки 2а = 2р). Величиной этого тока определяется сечение проводника, из которого должна быть изготовлена обмотка. Проводник будет тем толще, чем больше ток іа. На практике редко берут іа больше, чем 200 ампер. В машинах, имеющих петлевую обмотку, іа можно уменьшить путем увеличения числа полюсов (т. к. при этом одновременно увеличивается и число параллельных ветвей). Но в машинах малой и средней мощности невыгодно брать большое число полюсов и поэтому, если іа при данном числе полюсов выходит больше 200 ампер, приходится брать многократную петлевую обмотку, которая позволяет увеличить число параллельных ветвей в i раз, т. е. здесь 2а = і2р.
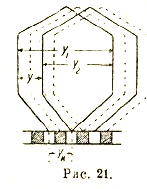
Рис. 21
Идея этой обмотки понятна из рис. 21. Здесь имеется две простых петлевых обмотки, из которых одна как бы вдвинута в другую. Достигается это тем, что шаг по коллектору берут здесь равным не ±1, а±i (где і — число отдельных обмоток, которое желательно получить). Начав обход с какой-либо пластины, мы обойдем только часть всех проводников, а (i-1)/i останутся свободными. Начав с другой свободной пластины, мы снова обойдем 1/i часть проводников, и т. д. При этом получится i самостоятельных обмоток, из которых каждая имеет 2а = 2р, а, следовательно, всего получится і·2р параллельных ветвей. При этом необходимо, чтобы ширина щетки была бы, по крайней мере, в i раз больше ширины одной пластины. На рис. 21 і = 2. Такие обмотки называются петлевыми многократно замкнутыми. Формулы для них:

Как уже указывалось, гладкие якоря в настоящее время не применяются. Однако, формулы обмоток остаются теми же и для зубчатых якорей, если определенным образом нумеровать активные стороны во впадинах. Практически обмотки машин постоянного тока всегда выполняются двухслойными. Стороны верхнего слоя (см. рис. 22) всегда нумеруются нечетными, а нижнего слоя — четными цифрами. Катушка, которая может состоять и из нескольких элементов, изготовленная предварительно на шаблоне, закладывается во впадины таким образом, чтобы одна ее сторона лежала в верхнем, а другая — в нижнем слое (см. рис. 23). Стороны катушки тщательно изолируются как от стенок впадины, так и между собой. Для предохранения обмотки от выбрасывания из впадины, в верхнюю часть последней заколачивается деревянный или фибровый клин, имеющий в разрезе форму ласточкина хвоста. Разрез через впадину с обмоткой и клином показан на рис. 24. Результирующий шаг волновой обмотки у = у1 + у2 = 2ук, как и в петлевой обмотке должен быть четным числом, а частичные шаги у1 и у2 — числами нечетными. Волновая обмотка может быть выполнена так, что при любом числе полюсов число параллельных ветвей будет равно 2 (2а = 2). Такая обмотка называется простой волновой или последовательной.
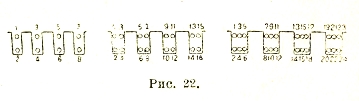
Рис. 22.
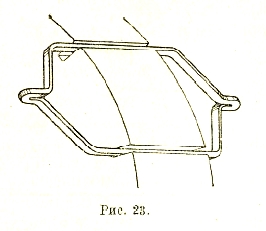
Рис. 23
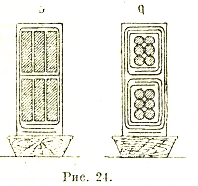
Рис. 24
На рис. 25 показана часть последовательной обмотки зубчатого якоря. Если начать обходить коллектор, например, с пластины 1, то, сделав один круговой обход, мы должны попасть в пластину 2 или 11, а не в 1, т. к. иначе обмотка замкнулась бы уже после первого обхода. Из рис. 25 видно, что между началом и концом первого обхода остается одна изоляционная прослойка на коллекторе; следовательно, если р — число пар полюсов, то ук·р ± 1 = К. Продолжая обмотку, мы после каждого обхода будем сдвигаться на одну коллекторную пластину и, наконец, обойдя все проводники и все пластины, вернемся в исходное положение и замкнем обмотку. Из найденной формулы следует, что ук= (K±1)/p или, так как у = 2ук , то у = (2K±2)/p=(S±2)/p. Первый частичный шаг у1≈y/2, а второй частичный шаг у2 = у—y1. Четырехполюсная волновая обмотка показана на рис. 26, а ее развертка на рис. 27.
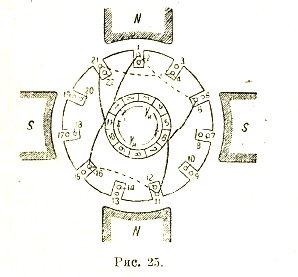
Рис. 25
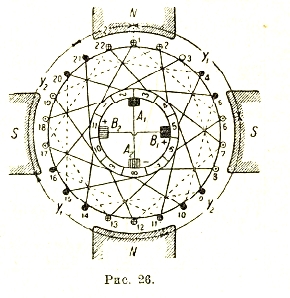
Рис. 26
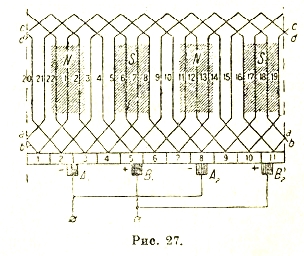
Рис. 27
Ее данные: S = N = 22; К = 11; 2р = 4; 2а = 2; у = S±2/p = (22-2)/2 = 10; ук = y/2 = 5; y1 = 5; y2 = y-y1 = 5. Если на коллектор наложены только 2 щетки (А, В), то получаются следующие 2 параллельные ветви: 1) щетка А1 пластина 2, проводники 3, 8, 13, 18, 1, 6, пластина 6, щетка B1; 2) щетка А1 пластина 3, проводники 22, 17, 12, 7, 2, 19, 14, 9, пластина 5, щетка B1. Проводники 20—15, 5—10, 16—11 и 12-4 замкнуты накоротко. Кроме двух необходимых, можно установить еще дополнительные щетки А2, В2 (так, чтобы полное число щеток было равно числу полюсов). При этом снова получается только 2 параллельные ветви: 1) щетка А1, пластина 2, проводники 3, 8, 13, 19, 1, 6, пластина 6, щетка B1; 2) щетка А1 пластина 3, проводники 22, 17, 12, 7, 2, 19, пластина 10, щетка, В2. Секции 20-15, 5—10, 16-11, 21-4, 14-9 — замкнуты накоротко. Для волновой обмотки, следовательно, можно, независимо от числа полюсов, взять только 2 щетки, но на практике почти всегда устанавливают число щеток равное числу полюсов, исходя из следующих соображений: при большем числе щеток на каждую из них приходится меньший ток, следовательно, при данной ширине (щетка не должна перекрывать больше 2—3 пластин) осевая длина щетки выходит меньше и коллектор короче. Кроме того, при наличии полного (=2р) числа щеток, машина работает более надежно в отношении искрения на коллекторе. При желании получить в волновой обмотке число параллельных ветвей >2, можно разместить на якоре несколько простых самостоятельных обмоток, т. е. устроить многократную волновую обмотку (принцип устройства тот же, что и для многократной петлевой обмотки). Отдельные обмотки включаются щетками параллельно, откуда еще другое название этой обмотки: последовательно-параллельная. Здесь также можно обойтись всего двумя щетками (соответственно увеличив их ширину), но и здесь, обычно, берут число щеток равным числу полюсов. При выполнении многократной волновой обмотки, между началом и концом каждого обхода должно оставаться а изоляционных прослоек, если мы хотим иметь а самостоятельных обмоток, т. е. всего 2а параллельных ветвей. Тогда здесь можно написать: рук = К±а, откуда ук = (К±а)/р и y = (2K±2a)/p = (S±2a)/p. Частичные шаги находятся, как и для простой волновой обмотки, по формулам: y1≈y/2; y2=y-y1. Нетрудно видеть, что формула у = (S±2a)/p является общей для всех волновых обмоток, т. к. при 2а = 2 она переходит в известную уже нам формулу у = (S±2)/p для простой волновой обмотки.
В случае, если в параллельных ветвях обмотки будут индуктироваться неодинаковые эдc, то в самой обмотке будут протекать уравнительные токи. Эти уравнительные токи будут замыкаться через щетки и создавать для них дополнительную нагрузку, что может вызвать искрение на коллекторе. Чтобы избежать этого, устраивают уравнительные или эквипотенциальные соединения, связывающие те точки обмотки, которые при одинаковых эдс в параллельных ветвях имели бы одинаковые потенциалы. Такие точки могут быть только в обмотках с числом параллельных ветвей большим 2. Шаг для уравнительных соединений по коллектору равен K/а изоляционных прослоек, т. е. n-ую пластину нужно соединять с [n+K/a] и т.д. Уравнительные соединения чаще всего встречаются в петлевых обмотках больших машин. Соединять можно было бы каждую пластину, но это вызвало бы большие расходы на медь. Поэтому обычно уравнительные соединения делают, пропуская 3—4 пластины. За один оборот якоря проводник перережет 2рФ силовых линий, а в секунду 2рФ n/60, где n число оборотов якоря в минуту. Так как величина эдс между щетками определяется числом проводников в одной параллельной ветви обмотки, то эдс на щетках будет больше, чем в N/2a раз. Таким образом, эдс машины постоянного тока определяется формулой
E = p/a n/60 ФN·10-8 вольт.
Обмотки машин переменного тока. Если на рис. 5, изображающем простейшую машину переменного тока, окружная скорость перемещения рамки относительно магнита будет v см/сек, то число силовых линий, перерезанных каждой стороной витка (т. е. аb или cd) в течение одной секунды, будет равно Вlv, где В — магнитная индукция, а I — длина проводника в направлении оси вращения. Число силовых линий, перерезанных в 1 сек. обеими сторонами рамки, будет вдвое больше, т. е. 2 Вlv. Этому же значению численно равна и величина эдс, индуктированной в рамке. Обозначая эту эдс через е и вводя множитель 10-8, чтобы получить результат в вольтах, найдем, что
е = 2 Вlv 10-8.
Если рамка будет состоять не из одного витка, как на рис. 5, а из w1 витков, причем толщина проволоки будет столь незначительной, что можно будет считать, что все витки одновременно проходят мимо какого-либо места на поверхности полюса (например, мимо его края) то эдс будет в раз больше и станет равной е = 2Вw1Іv·10-8. Если взять не двухполюсную конструкцию, а, например, четырехполюсную, то вместо одной рамки можно взять две соединенных последовательно, причем составляющие их стороны в любой момент времени будут занимать одинаковое положение относительно полюсов, т. е. в любой момент времени во всех проводниках будут индуктироваться одинаковые эдс. Для всей обмотки эдс будет вдвое больше, чем в предыдущем случае. Если вообще взять не 2, а 2р полюсов, то эдс будет в р раз больше, чем при двухполюсной конструкции, т. е.
е = 2 Blv·w1р·10-8 вольт.
Как уже указывалось, обмотка всегда укладывается во впадинах железного якоря. Если его диаметр равен D и число оборотов в минуту n, то окружная скорость
v=π·D·n/60
Т. к. πD = 2pτ, где τ — полюсное деление, то v = 2pτn/60. Обозначив полное число витков обмотки через w =w1р, мы найдем, что е = 4 • Blwτ pn/60·10-8 вольт. Т. к. pn/60 равно частоте f, то е = 4 Blwτf·10-8. Эта формула дает мгновенные значения эдс. Среднее значение найдем, подставив среднюю индукцию Вm. Тогда еm = 4Bmlwτf·10-8. Т. к. Вmlτ равно потоку одного полюса Ф, то еm= 4wfФ·10-8. Т. к. эффективное значение эдс Е = kf·em, где kf — коэффициент формы кривой (см. теоретические основы электротехники), то Е = 4kfwfФ·10-8. Для синусоидальной кривой kf = 1,11 и Е = 4,44 wfФ·10-8вольт. До сих пор мы рассматривали случай, когда число витков было равно числу полюсов или когда при большем числе витков толщина проволоки была весьма малой. На практике, однако, с целью лучшего использования поверхности якоря и с целью получения синусоидальной кривой эдс, витки обмотки располагают не в 2р впадинах, а в 2р-q, где q представляет собой число впадин на полюс. Если по-прежнему в каждую впадину поместить w1 витков, то окажется, что эдс всей обмотки будет теперь не в w = w1рq раз больше, чем в формуле е=2Blv 10-s, а в kww = kww1pq, где kw представляет собой обмоточный коэффициент, всегда меньший единицы. Происходит это потому, что если на полюс приходится несколько впадин, то эдс, индуктированные в проводниках, расположенных в этих впадинах, не будут одновременно достигать одинаковых значений, так как индукции для каждой впадины будут различными. Если машина будет не однофазной, а m-фазной, то при желании получить в каждой фазе эдс, определяемую приведенными выше формулами, необходимо взять для каждой фазы число витков w, т. е. взять число впадин в m раз больше. Тогда число впадин будет не 2pq. а 2pmq, где q — будет теперь числом впадин на полюс и фазу. Величина обмоточного коэффициента определяется формулой
Kw = (sin π/2m)/(q sin π/2mq)
Таким образом, в общем случае, когда число впадин на полюс и фазу не равно единице, величина эдс, наводимой в каждой фазе обмотки, составляет Е = 4kfkwwФ·10-8 или, при синусоидальной форме, Е = 4,44kwwФ·10-8. В нормальных трехфазных машинах обычно q = 3... 8 и kw = 0,96...0,956. Если каждая впадина содержит лишь один проводник, то такая обмотка называется стержневой и применяется обычно для машин, рассчитанных на большую силу тока. В машинах, рассчитанных на небольшую силу тока, применяют обычно катушечную обмотку, у которой в каждую впадину заложено несколько тонких проводников. Кроме этих двух типов обмоток, для синхронных и асинхронных машин применяются еще так называемые американские обмотки, описание которых будет дано ниже и которые представляют собой модификацию обмоток постоянного тока (но без коллектора). Для роторов асинхронных двигателей применяют главным образом два типа обмоток — двухслойные обмотки и короткозамкнутые обмотки (см. ниже). Наконец, для роторов коллекторных двигателей применяют обычные обмотки постоянного тока или сложные обмотки, состоящие из нескольких обмоток различных типов. Трехфазные обмотки соединяются или в звезду, или в треугольник. В первом случае напряжение на зажимах машины (линейное напряжение) V = E√З, где E напряжение одной фазы (фазовое напряжение), а линейный ток I = i, где i — фазовый ток. Во втором случае V = Е и I = і√3. Чаще всего применяется соединение звездой, т. к. при этом достигается большее приближение к синусоиде и, кроме того, фазовое напряжение значительно (в √3 ≈ 1,73 раз) меньше линейного, благодаря чему изоляция машины упрощается и удешевляется. Часто, особенно у асинхронных двигателей, выводят все шесть обмоточных концов для того, чтобы иметь возможность соединить обмотку звездой или треугольником, в зависимости от напряжения сети (например, при V = 120 в, — треугольник, при V = 210 в. — звезда). Та часть обмотки, которая расположена во впадине (находится между линиями 1 и 2 на рис. 28, 30, 32), является активной частью, так как участвует в получении эдс. Та же часть, которая находится вне железа, непосредственного участия в образовании эдс не принимает и служит для соединения между собой активных проводников. Эти части обмотки называются торцевыми, или лобовыми, соединениями. Так как в трехфазных обмотках катушки отдельных фаз частью находят друг на друга, то для возможности устройства обмотки лобовые соединения не могут располагаться в одной плоскости, а должны быть отогнуты друг от друга.
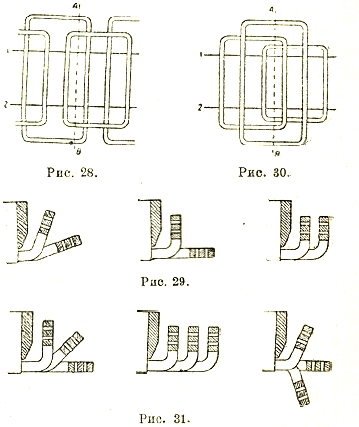
Рис. 28-31
Если лобовые части лежат в двух плоскостях (как показано на рис. 28), то такая обмотка называется двухэтажной. Если рис. 28 разрезать по линии АВ, то можно представить себе три способа отгибания лобовых частей, показанные на рис. 29. Если лобовые части расположены в трех плоскостях, то обмотка называется трехэтажной (рис. 30 и 31). Иногда все катушки получают одинаковую форму, как показано на рис. 32. Тогда лобовые соединения изгибаются по одному из способов рис. 33. Схема двухэтажной катушечной обмотки представлена на рис. 34. Отдельные фазы показаны различной штриховкой. Число впадин на полюс и фазу здесь q=2, и число полюсов 2р=4. Первая фаза сдвинута от второй на 2/3 полюсного деления (что в двухполюсной машине соответствует 120 градусам), вторая от третьей — также на 2/3 полюсного деления. Тонкими линиями показаны соединения отдельных катушек (из которых каждая может состоять из нескольких витков). Вся обмотка соединена в звезду. На рис. 35 показана обмотка с теми же данными, но имеющая одинаковые катушки, чем достигается выравнивание сопротивлений и индуктивностей отдельных фаз. На рис. 36 изображена двухслойная обмотка, снова с теми же данными. Этот тип обмотки, выполняемый технически точно так же, как и обмотки постоянного тока (но без коллектора), был прежде широко распространен лишь в Америке (отсюда и название этой обмотки «американская»), а в настоящее время завоевал себе прочное положение и в Европе благодаря целому ряду положительных качеств. При больших силах тока сечения проводников полу чаются столь значительными, что изготовление катушечной обмотки затрудняется. В этих случаях приходится или прибегать к параллельному соединению отдельных катушек между собой, или устраивать обмотку в виде стержневой. Обмотка с параллельным соединением катушек показана на рис. 37. Здесь 2р = 4, q = 2 и в каждой фазе по 4 катушки соединены между собой параллельно. Таким образом, сечение проводника рассчитывается здесь на силу тока в 4 раза меньшую, чем весь ток машины. Стержневые обмотки, как показывает уже их название, выполняются не из тонкого провода, а из отдельных изолированных стержней, закладываемых во впадины и соединяемых по торцам припаянными или приваренными перемычками. Типичная стержневая обмотка для 2р = 4, q = 4 показана на рис. 38 (для ясности здесь вычерчена лишь одна фаза). При очень больших силах тока и стержневые обмотки составляются иногда из 2 или нескольких параллельных ветвей.
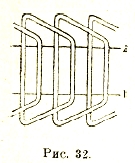
Рис. 32
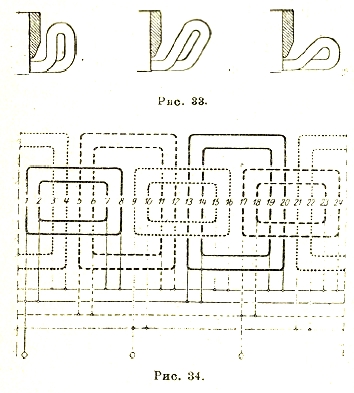
Рис. 33-34
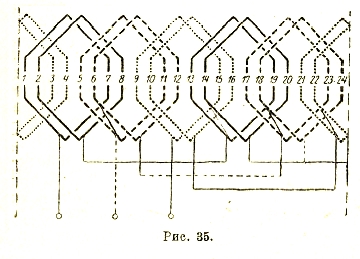
Рис. 35
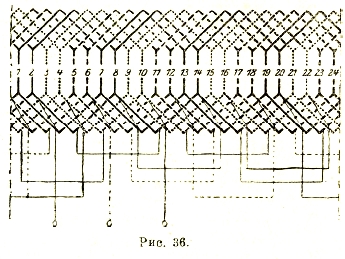
Рис. 36
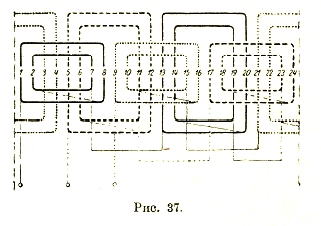
Рис. 37
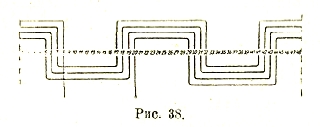
Рис. 38
В качестве обмоток для синхронных и асинхронных машин могут применяться и обычные обмотки постоянного тока (без коллектора). Так, например, если взять многополюсную волновую (последовательную) обмотку и подвести трехфазный ток к трем точкам, отстоящим друг от друга на одинаковое число проводов в порядке их последовательного соединения, то мы получим трехфазную обмотку, соединенную в треугольник. Если ток подведен к двум точкам, то получается однофазная обмотка и, наконец, если подвести шестифазный ток к 6 точкам, то получится обмотка шестифазная. Обмотка постоянного тока может быть представлена в виде многоугольника (потенциальный многоугольник), стороны которого по величине и направлению изображают эдс, наводимые в смежных проводах. При встречающемся на практике большом числе проводов многоугольник практически превратится в окружность. На рис. 39 изображены многоугольники для обмоток однофазной, трехфазной и шестифазной. Диаметр аb (для однофазной обмотки), хорды ab, bс, са (для трехфазной обмотки) и аb, bс, cd, de, ef, fa (для шестифазной обмотки) — представляют собой суммарные эдс, действующие между зажимами обмотки. Как видно из чертежей, эти эдс представляют собой геометрические суммы эдс отдельных проводников. Отсюда ясно, что обмотка использована тем лучше, чем больше число фаз. Мерой этого использования, как уже указывалось выше, является обмоточный коэффициент, равный отношению суммарной эдс к алгебраической сумме эдс отдельных проводников (или равный отношению хорды к охватываемой ею дуге), т. е. величина
Таким образом, для однофазной обмотки (m = 2) kw = 0,637, для трехфазной (m = 3) kw = 0,836, для шестифазной (m = 6) kw = 0,955. Обмотки постоянного тока могут быть также разрезаны в точках присоединения. Такие разрезные обмотки главным образом и применяются. В этом случае отдельные фазы соединяются в звезду. Если обмотку постоянного тока разрезать в шести местах, то мы получим по два отрезка, имеющих одну и ту же фазу, и можем соединить эти отрезки так, чтобы получить трехфазную обмотку.
Рис. 39
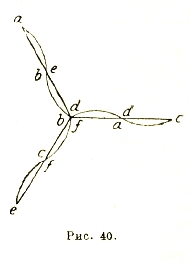
Рис. 40
На рис. 40 показана диаграмма такой обмотки, соединенной в звезду. Буквы, обозначающие отдельные отрезки, оставлены те же, что и на рис. 39 (справа). Делается это с целью получения лучшего использования меди, т. к. обмоточный коэффициент имеет здесь такую же величину, как и для шестифазной обмотки. Практически получается экономия в меди почти на 25%.
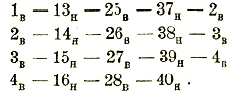
Для роторов асинхронных двигателей могут применяться уже рассмотренные нами обмотки: катушечные, стержневые и постоянного тока без коллектора. Однако, чаще всего здесь встречаются двухслойные стержневые обмотки с удлинением или укорочением перехода. В этом случае в каждой впадине находятся два стержня, уложенных один над другим, подобно тому, как в обмотках постоянного тока. Число впадин ротора u = 2рmq, где 2р — число полюсов, m — число фаз и q — число впадин на полюс и фазу. Отметим, что в подавляющем большинстве случаев число фаз ротора m = 3. Очень редко встречаются двухфазные роторы, однофазные же не применяются совершенно, так как не позволяют получить устойчивое число оборотов. Так же, как и в обмотках постоянного тока, в данном случае два соседних соединенных между собой проводника (находящихся на расстоянии одного шага) расположены, как правило, в различных слоях, т. е., если один лежит в верхней части впадины, то другой находится в нижнем слое. Если исходить из какого-либо лежащего в верхнем слое проводника, который мы (совершенно произвольно) обозначим через lв, то, чтобы перейти к следующему проводнику, нужно сдвинуться вдоль окружности ротора на некоторое число впадин. Это число называется шагом обмотки. Для рассматриваемых обмоток первый частичный шаг берут равным полюсному делению, т. е. у1 = u/2p = mq, что для трехфазных обмоток дает у1=3q. Таким образом, проводник lв должен быть соединен с проводником (3q + 1)н, где значок «н» обозначает, что этот проводник лежит в нижнем слое. Второй частичный шаг берут равным первому, т. е. y2 = y1 = 3q (заметим, что эти обмотки выполняются в виде волновых). Тогда проводник (3q + 1)н соединяют с [(3q + 1) + 3q]В = (6q + l)В. Если обойти шагами такой величины вдоль всей окружности ротора, то мы увидим, что мы вернулись снова к проводнику lв, т. е. обмотка замкнется, несмотря на то, что еще не все проводники использованы. Поэтому при обходе ротора последний шаг делают на единицу больше или меньше, т. е. берут его равным 3q± 1. В первом случае (+) получается обмотка с удлинением, а во втором случае (-) с укорочением перехода. Рассмотрим на примере первый случай. Предположим, что 2р = 4; q = 4; m = 3; u = 2p qm = 4·4·3 = 48; y1 = y2 = 3q = 12. От проводника lв идем к 1 + 12 = 13н, затем к 13 + 12 = 25в и к 25 + 12 = 37н. Если бы следующий шаг был опять взят равным 12, то мы пришли бы к проводнику 37 + 12 = 49в , т. е. к lв и замкнули бы обмотку. Поэтому последний шаг берем равным 12+1 = 13 и переходим к проводнику 37 +13 = 50в = 2В. Продолжая дальше, получим следующую таблицу:
Если бы теперь мы захотели продолжить обмотку таким же образом, то мы пришли бы к проводнику 40 + 13 = 53 = 5В, но этот проводник принадлежит уже к другой фазе, а вместе с тем мы обошли только половину проводников данной фазы. Для того, чтобы включить в обмотку и остальные провода, после q обходов (в данном случае 4) делают так называемое поворотное соединение, которое в виде исключения соединяет два нижних проводника, расстояние между которыми берется равным нормальному шагу, т. е. 3q. После этого шагание идет в обратном направлении. Тогда обмотка нашего примера продолжится следующим образом:
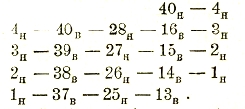
Схема этой обмотки (неполная) показана на рис. 41, причем для наглядности верхние провода показаны сплошной линией, а нижние пунктиром. Таким образом, наиболее важными пунктами обмотки являются: начало lв, конец 13в и поворотное соединение 40н — 4н . Точно так же выполняются и другие фазы обмотки. Из других обмоток для роторов асинхронных двигателей укажем еще на короткозамкнутые обмотки, в виде «беличьего колеса». Здесь во впадины ротора закладывается ряд медных (иногда алюминиевых) стержней, соединяемых по торцам массивными кольцами, как показано на рис. 42.
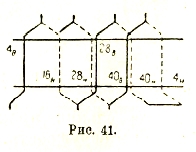
Рис. 41
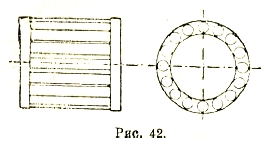
Рис. 42
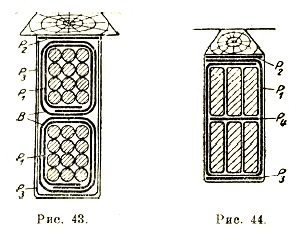
Рис. 43, 44.
Для некоторых машин применяются комбинированные обмотки, представляющие собой либо совокупность двух отдельных обмоток различного типа (некоторые коллекторные двигатели), либо одну единственную обмотку, снабженную одновременно и коллектором и кольцами (одноякорные преобразователи, некоторые коллекторные машины переменного тока).
Как уже неоднократно упоминалось, в современных машинах обмоточные проводники укладываются во впадины, выштампованные в листах, составляющих статор или ротор. Провода или стержни, из которых изготовляется обмотка, изолируются обычно путем обматывания хлопчатобумажной пряжей (в 2—3 слоя). Впадины бывают трех типов: открытые, закрытые и полузакрытые. Открытые впадины применяются чаще всего для машин постоянного тока (рис. 43) и удобны тем, что допускают предварительное изготовление обмотки на шаблоне, благодаря чему изоляция становится надежнее и уменьшается стоимость изготовления. Недостатком этих впадин (особенно важным для машин переменного тока) является неравномерное распределение силовых линий в воздушном промежутке. Совершенно закрытые впадины хотя и дают вполне равномерное распределение силовых линий, зато весьма увеличивают рассеяние и затрудняют изготовление обмоток. Применяются почти исключительно для роторов в виде беличьего колеса в асинхронных двигателях. Для машин переменного тока наиболее часто применяются впадины полузакрытого типа (рис. 44). Здесь, благодаря наличию зазора между зубцами, рассеяние будет практически таким же, как и у открытых впадин, а с другой стороны, в виду того что ширина зазора не превышает обычно 5 мм, распределение силовых линий в воздушном промежутке будет почти равномерным. Что касается изолирования проводников от стенок впадины, то при небольших напряжениях впадина обычно выкладывается лишь тонким слоем особого картона (пресшпана), так как качество изоляции здесь определяется скорее механическими, чем электрическими условиями. После закладывания обмотки она зажимается загоняемым сбоку деревянным или фибровым клином. При более высоких напряжениях секции обматывают дополнительно пресшпаном или льняной лентой. На дно впадины и под клин кладут пресшпановые полоски. На рис. 43 и 44 буквами Р1, Р2, Р3 обозначен пресшпан, а буквой В — льняная лента. Иначе обстоит дело с обмотками машин переменного тока высокого напряжения. Здесь изоляция впадины является наиболее ответственным местом всей конструкции и ей уделяется самое серьезное внимание. В таких машинах изоляция впадины состоит обычно из сплошной трубки, изготовленной из миканита или слюды. Проводники закладываются сбоку в трубку и затем трубка под давлением заполняется особой изолирующей массой, чтобы удалить воздух и создать более прочную, монолитную изоляцию. Так же тщательно изолируются в машинах высокого напряжения и лобовые соединения обмоток.
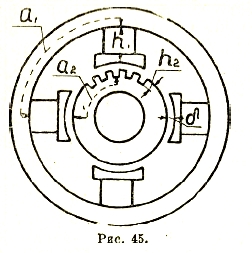
Рис. 45
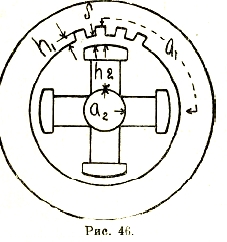
Рис. 46
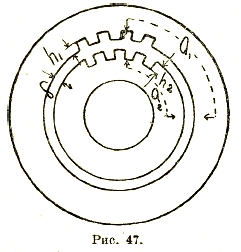
Рис. 47
Магнитная цепь электрических машин. Совокупность всех частей машины, через которые проходит магнитный поток, называется магнитной цепью, или магнитопроводом. Для вращающихся машин различают три вида магнитопроводов: с неподвижными выступающими полюсами, рис. 45 (машины постоянного тока и некоторые коллекторные машины), с вращающимися выступающими полюсами рис. 46 (обычные синхронные машины) и с неясно выраженными полюсами, рис. 47 (турбогенераторы, асинхронные машины и некоторые коллекторные машины). Магнитопроводы, показанные на рис. 45 и 46, имеют неравномерный воздушный промежуток, который, как и магнитное сопротивление, будет здесь наименьшим под полюсами. Принципиального различия между магнитопроводами по рис. 45 и 46 нет, лишь в первом случае полюса помещаются на статоре, а во втором — на роторе. Магнитную цепь по рис. 45 часто называют цепью с внутренним якорем, а по рис. 46 — с внешним якорем. На рис. 47 магнитопровод имеет повсюду одинаковый воздушный промежуток (если не учитывать влияния впадин и зубцов), а, следовательно, и одинаковое по всей окружности магнитное сопротивление. Для того, чтобы провести магнитный поток через какую-либо часть магнитопровода машины, необходимо затратить определенную энергию, величина которой может иметь чрезвычайно разнообразные значения в зависимости от материала, из которого состоит данная часть магнитной цепи, и длины пути прохождения потока. Величина потока, приходящаяся на 1 см3 поперечного сечения (т. е. сечения, перпендикулярного к направлению силовых линий), носит название магнитной индукции (см. теоретические основы электротехники) и выражается формулой В =Ф/Q гаусс, где Ф — поток в максвеллах, а Q — поперечное сечение в см2. Таким образом, при одной и той же энергии мы получаем в зависимости от сорта материала различные индукции, в то время как напряженность поля от материала не зависит. Между напряженностью поля Н и магнитной индукцией В существует зависимость В = μН, где μ — магнитная проницаемость. Следовательно, В тем больше, чем выше магнитная проницаемость материала. Для воздуха μ = 1, и поэтому здесь В = Н. Очевидно, с точки зрения экономичности выгодно при затрате определенного количества энергии иметь возможно большую индукцию, т. е. возможно больший магнитный поток. Так как наибольшей магнитной проницаемостью обладает железо и его модификации (чугун и сталь), то магнитопроводы электрических машин изготовляют всегда из этих материалов. При этом во вращающихся электрических машинах в качестве прослойки между неподвижной (статор) и вращающейся (ротор) частями приходится оставлять тонкий слой воздуха (воздушный промежуток, или междужелезное пространство) и затрачивать большую часть энергии возбуждения на проведение через него магнитного потока. С этим обстоятельством приходится мириться в силу невозможности без него обойтись. Так как даже для определенного сорта железа магнитная проницаемость не является величиной постоянной и изменяется в широких пределах в зависимости от величины напряженности поля Н, то и величина индукции В не остается пропорциональной Н. При малых Н, вследствие быстрого увеличения μ индукция В так же увеличивается очень быстро. Затем в некоторых пределах значений Н магнитная проницаемость остается постоянной, и индукция В растет пропорционально Н. Наконец, наступает т. н. насыщение железа, проницаемость начинает уменьшаться, увеличение В замедляется, и вскоре дальнейшее увеличение Н уже не в состоянии сколько-нибудь значительно повысить В. Так как напряженность поля Н обусловливает собой намагничивание магнитопровода, то ее часто называют еще намагничивающей силой. В практических расчетах пользоваться величиной Н неудобно и поэтому здесь берут пропорциональную ей величину aw = 0,8Н, где aw — число ампер-витков на 1 см пути. Физическое значение величины aw выясняется из следующих соображений. Если имеется соленоид, состоящий из w витков, по которым проходит ток і ампер, то возбуждаемый этим соленоидом поток будет определяться произведением iw ампер-витков, т. е. поток будет увеличиваться как при возрастании тока, так и при увеличении числа витков. Для того, чтобы в данном участке магнитопровода установить некоторый поток, потребуется известное число ампер-витков. Так как магнитное сопротивление пропорционально длине, то чем больше протяжение магнитопровода, тем большее потребуется число ампер-витков. То количество ампер-витков, которое требуется для установления данного потока в данном магнитопроводе при его длине в 1 см и будет величиной aw. Если длина пути составляет I см, то aw = iw/l. Из формулы В=μH следует, что для установления данной индукции В потребуется тем меньшая намагничивающая сила или тем меньшее число ампер-витков на см aw, чем больше магнитная проницаемость материала. Соотношения между В и aw даются обычно в виде кривых, показанных на рис. 48 для различных сортов железа (см. также электротехнические материалы). Т. к. во вращающихся частях машины все время происходит перемагничивание железа и возникают сопутствующие ему потери, то для уменьшения потерь те части магнитопровода, которые подвергаются перемагничиванию, изготовляются из тонких (обычно 0,5 мм) листов, изолированных друг от друга проклейкой бумаги толщиной около 0,05 мм. Листы собираются в пакеты так, чтобы плоскости раздела были параллельны направлению магнитного потока. Литая сталь и чугун применяются (чугун в последнее время очень редко) лишь для тех частей магнитопровода, где перемагничивание не имеет места (индукторы машин постоянного тока и синхронных). Для трансформаторов применяют листовое железо обычно толщиной 0,35 мм, чтобы еще больше понизить потери на перемагничивание. В малых машинах и трансформаторах оклейку листов бумагой часто заменяют покрытием тонким слоем особого изолирующего лака.
Как уже установлено выше, для получения в данном магнитопроводе данного магнитного потока необходимо определенное число ампер-витков. Если магнитопровод имеет длину I см, состоит из однородного материала и имеет всюду одинаковое поперечное сечение, то это число ампер-витков будет выражаться формулой АW=awl, где aw — число ампер-витков на 1 см длины. Если, как это всегда бывает на практике, магнитопровод состоит из нескольких частей, изготовленных из различного материала и имеющих различное сечение, то величина aw для всех этих частей не будет одинаковой, и в этом случае приходится разбивать цепь на отдельные участки, подсчитывать ампер-витки для каждого участка отдельно и затем их суммировать. Тогда
АW = aw1l1 + aw2l2 + aw3l3 +… = ∑ awl.
Величина AW является как бы источником магнитного потока и носит название магнитодвижущей силы (сокращенно мдс). Так как величина мдс зависит только от числа витков и силы тока, то при постоянном числе витков мдс будет зависеть всецело от тока. Если ток постоянный, то и мдс будет иметь постоянную величину; если ток переменный, то и мдс будет изменяться с тем же числом периодов, т. е. будет колебаться от некоторого положительного максимума до такого же по абсолютной величине отрицательного максимума. Мдс создает магнитный поток, проходящий из статора в ротор или из ротора в статор через воздушный промежуток машины. При этом в большинстве случаев магнитная индукция не будет во всех точках этого воздушного промежутка одинаковой либо вследствие того, что мдс не будет распределена равномерно вдоль воздушного промежутка, либо вследствие того, что сам воздушный промежуток будет не вполне равномерным, т. е. его магнитное сопротивление не будет во всех точках одинаково.
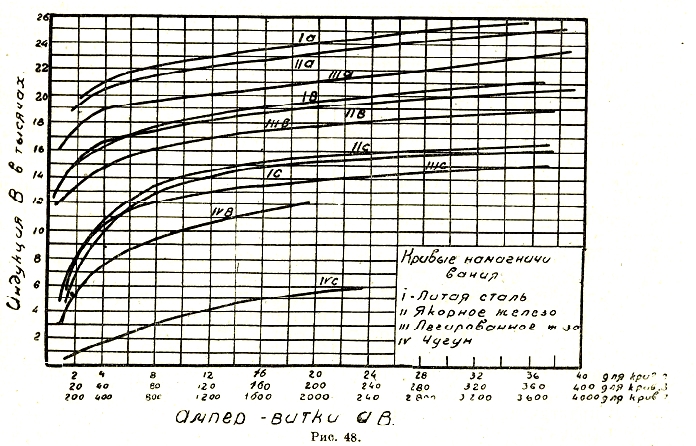
Рис. 48
Рассмотрим сперва возбуждение мдс однофазным переменным током, причем первоначально — для случая магнитопровода, показанного на рис. 47, т. е. для магнитопровода с равномерным воздушным промежутком. Далее предположим, что наша обмотка имеет число впадин на полюс и фазу q=1, как показано на рис. 49. Здесь имеется ряд катушек, ширина которых равна полюсному делению τ. Если по этим катушкам проходит электрический ток, то возникает мдс, возбуждающая магнитный поток, пронизывающий катушку и замыкающийся через два воздушных промежутка, как показано на рис. 49 тонкими линиями со стрелками.
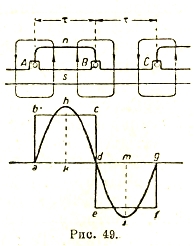
Рис. 49
Такая катушка представляет собой не что иное, как соленоид, и обладает, следовательно, двумя магнитными полюсами: северным (n) и южным (s). Так как величина мдс определяется произведением из силы тока на число витков и так как внутри катушки никаких источников магнетизма не имеется, то во всех точках внутри катушки, т. е. на всем протяжении полюсного деления, мдс будет одинаковой и графически изобразится в виде четырехугольника abсd. На протяжении соседнего полюсного деления (на участке ВС) мдс также будет во всех точках иметь одинаковую величину, равную предыдущей, но направлена она будет в противоположную сторону. Поэтому четырехугольник defg, характеризующий закон изменения мдс на участке ВС, построен ниже линии аg. Высота прямоугольника аb или dg равна половине мдс всей катушки, т. к на участках ad или dg поток проходит только через один воздушный промежуток. Так как в рассматриваемом случае воздушный промежуток равномерный, то и поток также будет распределен равномерно, т. е. индукция будет везде иметь одинаковую величину, а направление ее будет соответствовать направлению мдс. Другими словами, закон изменения индукции будет характеризоваться той же ломаной линией abсdefg, но в другом масштабе. Т. к. мдс вызывается здесь переменным током, то и сама она будет изменяться во времени с тем же числом периодов f. Если мгновенное значение циркулирующего в катушке переменного тока будет і = √2l sin ωt, где I — эффективное значение тока (см. теоретические основы электротехники), то мгновенное значение мдс будет
![]()
где ω — число витков катушки. В технике переменных токов все расчеты значительно упрощаются, если изменение тех или иных величин происходит по синусоиде. Раскладывая нашу прямоугольную кривую на ряд синусоид (см. теоретические основы электротехники), мы берем только основную гармонику и пренебрегаем влиянием других. Эта основная гармоника показана на рис. 49, причем ее амплитуда, т. е. высота kh или Іm будет в 4/π (~ 1,27) раза больше высоты прямоугольника аb или fg. Тогда мгновенное значение основной синусоиды мдс выразится равенством
![]()
а ее амплитуда
![]()
Рассмотрим теперь случай, изображенный на рис. 50, когда на полюс приходится несколько впадин (q > 1). Здесь, внутри катушки мдс также будет постоянной (на участке bс она будет равна bh). Когда же мы начнем двигаться от точки b влево или от точки с вправо, то мы увидим, что мдс начнет постепенно уменьшаться вследствие уменьшения числа витков и в точке а мдс станет равной нулю. Другими словами, изменение мдс в этом случае будет уже происходить не по закону прямоугольника, а по закону ломаной линии, причем между отдельными впадинами мдс будет оставаться постоянной (ступеньки на рис. 50).
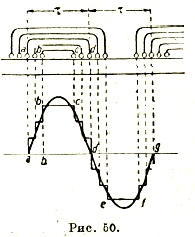
Рис. 50.
И в этом случае можно заменить ломаную abсdefg основной синусоидой, причем, как видно из чертежа, здесь такая замена приводит к меньшим ошибкам, чем в предыдущем случае, так как здесь закон изменения мдс гораздо ближе к синусоидальному.
Если магнитопровод устроен по схеме рис. 45 или 46, то на закон изменения мдс это не влияет, т. к. из предыдущего ясно, что характер кривой мдс зависит исключительно от расположения обмотки. Что же касается закона распределения магнитной индукции, то здесь он уже будет отличаться от закона распределения мдс, т. к. магнитное сопротивление здесь изменяется вдоль воздушного промежутка.
При возбуждении многофазным переменным током мдс создается в результате совместного действия отдельных, сдвинутых в пространстве, фазных обмоток, обтекаемых сдвинутыми во времени фазными токами. При этом, как известно (см. теоретические основы электротехники), получается вращающееся магнитное поле, имеющее постоянную величину и перемещающееся в пространстве с синхронной скоростью, т. е. совершающее в минуту n = 60f/p оборотов, где f —частота тока, а р — число пар полюсов машины. При обычно встречающемся числе впадин на полюс и фазу q = 3…4, распределение результирующей мдс в пространстве можно практически считать синусоидальным, причем амплитуда мдс для трехфазного тока в 3/2 раза больше амплитуды мдс каждой фазы, т. е. равна
Возбужденный этой мдс поток также будет вращаться в пространстве в отличие от пульсирующего во времени и неподвижного в пространстве потока однофазной обмотки. Можно, однако, всякую пульсирующую во времени и неподвижную в пространстве величину привести к двум вращающимся в противоположные стороны величинам, неизменным во времени.
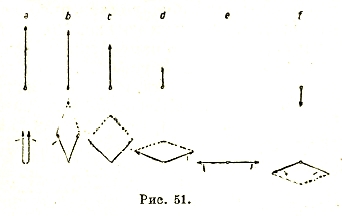
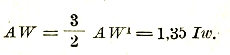
Рис. 51
На рис. 51 вверху представлена (а) мдс однофазной обмотки в тот момент, в который она достигает наибольшей величины. Эту мдс можно представить состоящей из двух одинаковых по величине мдс, равных каждая половине действительной и направленных в одну и ту же сторону. Если обе эти составляющие вращаются в разные стороны с одинаковой (синхронной) скоростью, то через некоторый промежуток времени они займут положение b и, суммируя их геометрически, мы получим мдс, показанную на чертеже над ними, величина которой уже будет меньше, чем в случае а. При дальнейшем вращении составляющих результирующая мдс (с и d) будет уменьшаться еще больше, пока не наступит момент е, когда результирующая мдс станет равной нулю, т. к. в этот момент составляющие направлены друг против друга и взаимно уничтожаются. В положении f результирующая мдс будет направлена уже в другую сторону; далее она снова начнет увеличиваться в этом направлении, дойдет до максимума, снова станет уменьшаться, перейдет через нуль и т. д. В машинах переменного тока одну из этих составляющих обычно удается уничтожить или, по крайней мере, настолько ослабить, что ее влиянием можно пренебречь. Тогда и здесь получается вращающееся поле, но имеющее амплитуду в 2 раза меньшую, т. е.
![]()
Если через обмотку пропускается постоянный ток, то мдс и магнитный поток также будут постоянными и во времени, и в пространстве. Рассмотрим сперва магнитопровод типа рис. 47. Одна из форм такой обмотки показана на рис. 52. Здесь все впадины на протяжении всего полюсного деления заполнены обмоткой. Мдс будет иметь наибольшую величину в середине полюсного деления, т. к. здесь число ампер-витков будет наибольшим. В точках а и b мдс будет равна нулю.
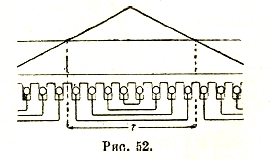
Рис. 52
Рис. 53
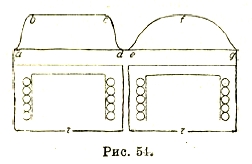
Рис. 54
Следовательно, мдс распределена здесь по закону треугольника, сильно отличающемуся от закона синусоиды, что совершенно недопустимо. Исходя из этого, в современных машинах обычно заполняются не все впадины на протяжении полюсного деления, а лишь часть их (обычно 2/3) и притом так, что в середине полюсного деления обмотки нет (рис. 53). При таком расположении мдс в средней части полюсного деления будет постоянной, и распределение мдс будет иметь форму трапеции. Если обмоткой заполнено 2/3 всех впадин, то закон распределения практически мало отличается от синусоиды. В некоторых случаях обмоткой заполняются все впадины, но число проводников в них берется неодинаковым, а именно: посередине меньше, а по краям больше. Такая конструкция, хотя и сильно удорожает изготовление машины, но зато форма поля получается при ней чисто синусоидальной. В случае магнитопроводов типа рис. 45 или 46 обмотка укладывается вокруг выступающих полюсов, как показано на рис. 54. Здесь уже величина воздушного промежутка не будет одинаковой на всем протяжении полюсного деления. Если поверхность полюса, обращенная к воздушному промежутку, обточена так, что воздушный промежуток под полюсом везде одинаков (машины постоянного тока), то кривая распределения магнитного потока (и магнитной индукции) представляет собой прямоугольник abсd (рис. 54 слева). Для того, чтобы получить форму кривой поля, более приближающуюся к синусоиде (необходимо для машин переменного тока), поверхность полюса обтачивают эксцентрично так, чтобы воздушный промежуток под краями полюса был больше, чем под его серединой. Тогда распределение поля и индукции будет происходить по некоторой кривой efg (рис.54 справа), которую путем придания полюсу определенного эксцентриситета можно значительно приблизить к синусоиде.
Для подсчета мдс машины, т. е. полного числа ампер-витков, необходимого для получения заданной эдс можно воспользоваться найденным выше уравнением
![]()
Величина
![]()
для данной машины является постоянной, и тогда Е = А Ф, т. е. для данной машины эдс зависит исключительно от величины магнитного потока, и ее форма будет тождественна с формой этого потока. Зная величину потока, геометрические размеры магнитопровода (длину и поперечное сечение), можно подсчитать индукции в различных частях магнитной цепи, а зная материал, из которого они сделаны, можно подсчитать по кривой рис. 48 ампер-витки на см длины (аw). После этого подсчитываются ампер-витки для каждого участка магнитопровода и суммируются. Обычно из всего числа ампер-витков, необходимых для создания данного магнитного потока, большая часть тратится на преодоление магнитного сопротивления воздушного промежутка. Если каким-либо образом начать уменьшать или увеличивать мдс (проще всего уменьшать или увеличивать для этого проходящий через обмотку ток), то магнитный поток Ф и пропорциональная ему эдс также начнут уменьшаться или увеличиваться. Если задаться несколькими значениями потока и просчитать для них по указанному выше способу мдс, то можно построить очень важную кривую зависимости между ними, т. н. характеристику намагничивания машины. Для этого откладываем в некотором масштабе (рис. 55) по вертикальной линии от некоторой точки О эдс оа, ob, ос…, а по горизонтальной линии, также от точки О, соответствующие им мдс оm, on, oq… Если теперь через точки а,b,с,… провести горизонтали до встречи с вертикалями, проведенными из соответствующих точек m, n, q … —, и полученные точки пересечения х, у, z… соединить плавной кривой, то мы и получим характеристику намагничивания машины охуz… При малых эдс, т. е. при малых потоках, индукция настолько мала и магнитная проницаемость железа настолько велика, что магнитное сопротивление обусловлено исключительно воздушным промежутком, а т. к. для воздуха мдс пропорциональна потоку, то их характеристика намагничивания будет здесь прямой линией. Однако, при дальнейшем увеличении Ф и Е магнитная проницаемость падает, магнитное сопротивление железа возрастает, и поток начинает увеличиваться медленнее, чем мдс: кривая загибается книзу. При еще большем увеличении Ф и Е насыщение железа увеличивается еще больше и, наконец, наступает такое состояние, когда далее значительное увеличение мдс не вызывает заметного роста Ф и Е. Зная, на какой точке кривой лежит нормальная эдс машины, можно судить о степени ее насыщения. Насыщение не должно быть слишком малым, т. к. тогда малейшее изменение мдс (например, вследствие изменения сопротивления обмотки от нагревания) вызывало бы значительные колебания эдс, что совершенно недопустимо. С другой стороны, слишком большое насыщение хотя и дает устойчивую эдс, но увеличивает мдс и удорожает изготовление машины. Обычно нормальная эдс лежит на перегибе кривой (примерно, между точками у и z рис. 55). Характеристика намагничивания машины является весьма ценной и при испытании машин, т. к. с ее помощью можно найти ряд зависимостей между различными величинами, определяющими работу машин.
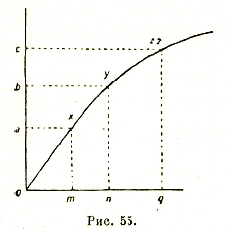
Рис. 55
Коэффициент полезного действия (кпд). Идеальным случаем работы электрических машин (как и всякой машины вообще) был бы такой, при котором вся подводимая энергия целиком могла бы быть получена от машины в другой форме. Однако, как бы ни усовершенствовалась конструкция машин, какие бы материалы для них не применялись, этот случай на практике осуществлен быть не может. Прохождение тока по проводнику, согласно закону Джоуля, связано с выделением тепла за счет части пропускаемой через проводник энергии. Перемагничивание железа также связано с выделением теплоты. Наконец, трение в подшипниках и сопротивление вращению со стороны окружающего воздуха также требуют для своего преодоления некоторого расхода энергии. Все эти потери, превращаясь в теплоту и рассеиваясь в окружающем пространстве, требуют затраты известного количества работы, доставляемого первичным источником энергии (для генератора — первичным двигателем, для двигателя — питающей его сетью) и являющегося безвозвратно потерянным; другими словами, энергия, получаемая машиной, всегда больше, чем отдаваемая. Если обозначить мощность, подводимую к машине, через Ра, а мощность, отдаваемую ею — через Р, то отношение
![]()
всегда меньше единицы и называется коэффициентом полезного действия. Так как полная мощность Ра состоит из полезной мощности Р и потерь W, то кпд может быть также выражен в форме

Для удобства изучения все потери в машине можно разбить на три группы: потери в меди, потери в железе и потери на трение (или механические). Очевидно, что в трансформаторах последняя группа потерь не имеет места. Потери в меди, т. е. в проводниках обмоток, прежде всего, обусловлены прохождением тока. По закону Джоуля, эта, т. н. омическая, потеря составляет Wm = I2R, где I — сила тока, идущего через проводник, имеющий омическое сопротивление R Ом. Эти потери имеют место как в рабочих обмотках (например, якорь машины постоянного тока, статор синхронной машины и т. д.), так и в обмотках, создающих магнитное поле машин (обмотках возбуждения). К этим же потерям могут быть отнесены потери, обусловленные прохождением тока через контакт между щетками и контактными кольцами или коллектором. Кроме этой потери, в проводниках обмоток благодаря потокам, охватывающим их и пересекающим их своими силовыми линиями, индуктируются т. н. вихревые токи, или токи Фуко (см. теоретические основы электротехники), замыкающиеся в виде вихрей внутри проводника и обусловливающие, особенно в массивных проводниках, значительные потери, называющиеся добавочными потерями в меди. Величина этих добавочных потерь точному учету не поддается, ввиду влияния целого ряда обстоятельств, предусмотреть которые очень трудно. К потерям в меди можно также отнести потери в реостатах, регулирующих силу тока возбуждения в машинах. Потери в железе обусловлены переменным перемагничиванием магнитопровода в целом или его отдельных частей. Прежде всего, здесь следует отметить потерю, затрачиваемую на работу перемагничивания или потерю на гистерезис. При тех больших индукциях, которые встречаются в магнитопроводах современных машин, эта потеря оказывается пропорциональной: частоте перемагничивания f (числу полных перемагничиваний в секунду), квадрату индукции В, объему перемагничиваемого железа V, толщине железных листов, из которых составлен магнитопровод а, и может быть выражена формулой Wh = AhfB2V·а, где Ah — коэффициент, зависящий от сорта железа. Кроме потерь на гистерезис, в железе имеют еще место потери на токи Фуко (от индуктируемых в нем переменным потоком вихревых токов, или токов Фуко), зависящие от квадрата частоты перемагничивания, квадрата индукции, объема железа, квадрата толщины железа и сорта железа. Эта потеря может быть выражена формулой Wf = Af f2B2Va2, где Af — снова коэффициент, зависящий от сорта железа. Далее, в железе появляется еще потеря на вихревые токи, вызываемые колебаниями магнитной индукции в слоях, лежащих у воздушного промежутка, вследствие наличия на статоре или роторе (или и на том и на другом) зубцов и впадин. Т. к. индуктируемые здесь токи не проникают в толщу железа, а располагаются на поверхности, то и самая потеря называется поверхностной. К потерям в железе относятся также пульсационные потери, вызываемые колебаниями индукции в зубцах статора и ротора, а также добавочные потери, обусловленные местными короткими замыканиями между отдельными листами, появляющимися в результате их механической обработки (штамповки, резки, сверления и т. д.). Несмотря на тщательное изготовление и обильную смазку, потери, обусловленные трением цапф в подшипниках, достигают довольно больших величин. Эти потери зависят, c одной стороны, от величины трущейся поверхности, а с другой стороны — от скорости вращения и температуры подшипников. С целью понизить эти потери, небольшие машины часто изготовляют с шариковыми или роликовыми подшипниками. Потеря на сопротивление от воздуха точному учету не поддается. В малых машинах она имеет обычно очень небольшую величину, но зато в больших быстроходных машинах (турбомашины) она может дойти до 2% от общей мощности машины. К потерям на трение можно также отнести мощность, затрачиваемую на вращение вентиляторов, способствующих лучшему охлаждению машины.
Потери в машине не являются во всех случаях постоянными при любой нагрузке машины. Таким постоянством (и то приблизительным) обладают только потери механические. Практически постоянными можно также считать потери в железе, т. к. эдс, создаваемая магнитным потоком, обусловливающим эти потери, при всех нагрузках машины остается приблизительно постоянной. Потери в меди рабочих обмоток пропорциональны квадрату силы тока и с увеличением нагрузки растут очень быстро. Отсюда следует, что кпд машины также не является величиной постоянной и сильно зависит от нагрузки. На рис. 56 представлена в виде кривой типичная зависимость между кпд и нагрузкой машины, выраженной в долях от нормальной. Из этой кривой видно, что вначале, когда нагрузка мала, кпд растет очень быстро, т. к. в этой области потери в меди сравнительно невелики. При дальнейшем увеличении нагрузки увеличение кпд замедляется (потери в меди быстро возрастают) и, наконец, при еще большей нагрузке кпд начинает падать, т. к. потери в меди достигают очень большой величины. При отсутствии нагрузки (при холостом ходе) кпд равен нулю, т. к. машина не совершает никакой полезной работы. Обычно машины проектируются так, чтобы наибольшего значения кпд достигал около нормальной нагрузки. Что касается абсолютной величины кпд, то она зависит от типа машины и от ее мощности. Вообще говоря, в электрических машинах кпд весьма высок, достигая в наиболее мощных типах машин до 97—98%, а в наиболее мощных трансформаторах до 99—99,5%.
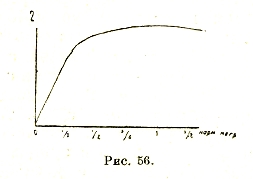
Рис. 56
Нагревание электрических машин. Т. к. потери машины переходят в теплоту, то при работе машина постепенно нагревается, причем повышение температуры происходит до тех пор, пока не установится тепловое равновесие, т. е. машина будет отдавать в окружающую среду столько же тепла, сколько она получает его от происходящих в ней потерь. Для того, чтобы не произошло обугливания и разрушения изоляции обмоток, предельная температура не должна превосходить определенных значений, установленных электротехническими нормами. В машинах небольшой мощности, где потери невелики, а поверхность, через которую теплота переходит в окружающую среду, относительно велика, это условие выполнить легко, и здесь вполне достаточным является естественное охлаждение машины. Напротив, в машинах большой мощности, где потери по сравнению с величиной машины достигают огромных значений, такого естественного отвода теплоты уже недостаточно и приходится прибегать к искусственному охлаждению с помощью крыльчатого вентилятора сидящего на валу машины, а в особенно трудных случаях (турбомашины) к продуванию холодного воздуха через корпус машины. К таким же мерам приходится прибегать и в случае, когда по условиям эксплуатации машина должна быть изготовлена герметически закрытой. Для небольших закрытых двигателей иногда применяют водяное охлаждение, когда вода проходит через особую охладительную рубашку, соприкасающуюся с нагретыми частями машины. Для лучшего охлаждения трансформаторов их погружают в баки, наполненные минеральным маслом, а при очень больших мощностях это масло охлаждают, кроме того с помощью погруженного в него змеевика, сквозь который пропускается холодная вода. Вопросы нагревания и охлаждения машин являются в электромашиностроении весьма важными, т. к. нагреванием машины, в конечном счете, определяется ее мощность. Понятным, поэтому, является стремление возможно больше повысить охлаждаемость машины. В последнее время для этой цели начинают применять водород из-за его легкости (а, следовательно, и меньших потерь на продувание) и лучших, чем у воздуха, способностей отнимать тепло у нагретых частей машины.
Рис. 57
Машины постоянного тока (м. п. т.). Реакция якоря. До тех пор, пока в проводниках, составляющих обмотку якоря м. п. т., ток не проходит (т. е. машина вращается вхолостую), магнитный поток создается исключительно индуктором (полюсами) машины. Этот случай показан на рис. 57 слева. Магнитный поток полюсов, т. н. основной поток машины, направлен здесь снизу вверх. При вращении якоря, в его обмотке индуктируется эдс, достигающая наибольшей величины в проводниках, расположенных в данный момент времени под полюсами, и равная нулю в проводниках, лежащих на нейтральной линии mn (т. к. здесь при вращении проводники не пересекают магнитных силовых линий). Из чертежа видно, что нейтральная линия расположена перпендикулярно к оси полюсов. Если теперь прекратить возбуждение полюсов (выключив ток в обмотке возбуждения) и питать якорь от постороннего источника постоянного тока, то якорь сам станет электромагнитом, как видно из рис. 57 (средний чертеж), и образует два полюса (северный и южный). Магнитная ось якоря, т. е. линия, проходящая через его полюса, будет направлена по нейтрали машины, т. е. будет совпадать с осью щеток. Очевидно, что при нормальной работе машины, когда возбуждена обмотка полюсов и сам якорь пронизывается током, будут существовать оба потока: основной и поток якоря, иначе называемый потоком реакции якоря. Так как существование двух самостоятельных потоков в одном магнитопроводе невозможно, то оба поля, сложившись, дадут некоторый результирующий поток машины при нагрузке, который, по сравнению с потоком холостого хода, оказывается перекошенным, как показано на рис. 57 справа. Т. к. силовые линии результирующего потока проходят теперь в якоре под некоторым углом к вертикали и т. к. нейтральная линия должна быть всегда перпендикулярна к направлению силовых линий, то, очевидно, мы будем иметь здесь смещение нейтрали на угол α. На такой же угол должны быть передвинуты и щетки машины для достижения правильной работы. Новая нейтраль m1n1 называется физической в отличие от геометрической нейтрали mn. Смещение физической нейтрали происходит для генераторов в направлении вращения якоря, а в двигателях — в сторону, противоположную вращению. Следствием реакции якоря является уменьшение потока машины, а, следовательно, и уменьшение эдс. Уменьшение потока появляется в результате того, что в одной части машины силовые линии сгущаются, а в другой разрежаются, причем вследствие насыщения железа сгущение не компенсируется разрежением и магнитное сопротивление увеличивается. Для того, чтобы вернуть эдс к ее прежнему значению, приходится увеличивать ток возбуждения. Помимо этого, реакция якоря, вызываемая током самого якоря, увеличивается с возрастанием нагрузки машины. Отсюда ясно, что величина смещения физической нейтрали также зависит от нагрузки, т. е., другими словами, каждой нагрузке машины соответствует одно определенное правильное положение щеток и при волком изменении нагрузки щетки должны быть переставляемы. Это создает очень большие неудобства при эксплуатации, и поэтому в современных м. п. т. поле реакции якоря уничтожают с помощью дополнительных полюсов, расположенных в геометрической нейтрали и создающих поток, равный, но противоположный по направлению, потоку реакции якоря. Обмотку возбуждения дополнительных полюсов соединяют последовательно с якорем, и тогда компенсация происходит автоматически при всех нагрузках, т. к. при слабо насыщенных дополнительных полюсах изменение потока будет пропорциональным изменению тока в якоре. Ниже мы увидим, что у дополнительных полюсов есть еще и другая задача — улучшение коммутации машины.
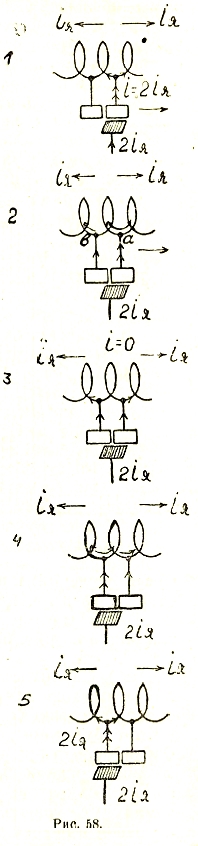
Рис. 58
Коммутация тока. При вращении якоря все коллекторные пластинки последовательно проходят под щеткой. Т. к. щетки неподвижны, то картина распределения параллельных ветвей в обмотке остается постоянной, т. е. под некоторым полюсом, например северным, направления эдс и тока в проводниках остаются всегда одними и теми же. Таким образом, роль щеток сводится к последовательному переключению проводников обмотки из одной ветви якоря в другую. Это переключение, происходящее в момент перехода переключаемого проводника через нейтраль, называется коммутацией тока. Процессы, происходящие во время коммутации, чрезвычайно сложны и до сих пор их нельзя еще считать окончательно изученными, несмотря на огромный фактический материал, накопленный многолетними исследованиями. Последовательный ход коммутационного процесса показан на рис. 58, где принято, что обмотка и коллектор перемещаются вправо, щетка неподвижна и ширина щетки равна ширине одной коллекторной пластины. На черт. 1 изображен момент, когда щетка соприкасается еще только с правой пластиной, т. е. момент, предшествующий началу коммутации. Весь ток 2 ія, поступающий из внешней сети, проходит через правую пластину и затем, пройдя через соединительный проводник и войдя в обмотку, равномерно распределяется в обе стороны (в обе параллельные ветви). Как видно из чертежа, через среднюю секцию (присоединенную к обеим коллекторным пластинам) проходит ток iя, равный половине всего тока, идущего через щетку. Направление этого тока – справа налево. В следующий момент (черт. 2), когда коллектор несколько передвинется, в соприкосновение со щеткой войдет и левая пластина. Т. к., однако, поверхность контакта между щеткой и левой пластиной меньше, чем между щеткой и правой пластиной, то весь ток 2ія распределится между пластинами неравномерно: большая часть тока пойдет через правую пластину, а меньшая — через левую. Дойдя до точки а, ток правой пластины отчасти пойдет в правую параллельную ветвь (ток ія), а остаток — в среднюю секцию, обойдя которую и соединившись в точке b с током левой пластины в ток ія, он направится в левую параллельную ветвь. Очевидно, что ток, проходящий в этом случае через среднюю секцию, будет меньше, чем ія, т. е. чем в первом случае. На черт. 3 показан следующий момент, когда щетка перекрывает обе пластины равномерно, т. е. площади контакта между щеткой и каждой из пластин одинаковы. В этом случае через каждую из пластин проходят одинаковые токи ія, которые и переходят затем в правую и левую ветви якоря, минуя среднюю секцию (ток в средней секции равен нулю). При дальнейшем перемещении коллектора (чертеж 4), когда площадь контакта между щеткой и левой пластиной становится больше, чем между щеткой и правой пластиной, большая часть тока идет через левую пластину, и, как видно из чертежа, часть этого тока проходит через среднюю секцию в правую параллельную ветвь. Наконец, в момент окончания коммутации (черт. 5) правая пластина выходит из соприкосновения со щеткой, весь ток 2 ія идет через левую пластину, и половина этого тока, т. е. ія, поступает через среднюю секцию в правую ветвь якоря. Таким образом, за время (или, как говорят, за период) коммутации ток в средней секции, начиная от нормальной величины ія, постепенно уменьшается, переходит через нулевое значение и снова увеличивается, но уже в обратном направлении, до величины ія. Если бы процесс коммутации не осложнялся никакими другими явлениями, то описанное изменение тока в коммутируемой секции было бы вполне равномерным, ток изменялся бы по закону прямой линии. Поэтому такую «идеальную» коммутацию называют прямолинейной. В действительности, однако, явление осложняется тем, что, благодаря изменению тока, в секции возникает эдс самоиндуктивности и взаимоиндуктивности (см. теоретические основы электротехники), — т. н. реактивное напряжение коммутации еr, — и, кроме того, в общем случае, секция вращается в постороннем магнитном поле (например, если щетки сдвинуты от нейтрали), которое также создает в ней эдс, т. н. эдс внешнего поля ек. Эдс еr и ек создают в секции дополнительный ток, накладывающийся на ток прямолинейной коммутации и вызывающий уже неравномерное изменение тока за период коммутации, т. е. прямолинейность коммутации нарушается. Это нарушение усугубляется еще наличием сопротивления самой секции и соединительных проводников, хотя, впрочем, практическое влияние этого обстоятельства в современных машинах ничтожно. Все указанные причины приводят к тому, что переход тока через нуль совершается в коммутируемой секции или раньше середины периода коммутации (ускоренная коммутация), или позже (замедленная коммутация). Искажение коммутации практически приводит к искрению под щетками. Избежать вызванного коммутацией искрения можно двумя путями: увеличивая сопротивление контакта между щетками и тем затрудняя прохождение тока (это достигается применением в современных м. п. т. угольных щеток) или уничтожая самую причину искажения коммутации, т. е. появление эдс еr и ек. Последнего можно добиться, сдвигая щетки машины в область поля главных полюсов, причем в такую сторону и на такую величину, чтобы индуктированная в секции этим полем эдс ек была равна, а по знаку противоположна, реактивному напряжению еr, т. е., чтобы соблюдалось условие ек = —еr. Для этой цели необходимо в генераторах сдвигать щетки за физическую нейтраль в сторону вращения якоря, а в двигателях — против вращения якоря. Так как, однако, величина реактивного напряжения еr зависит от силы коммутируемого тока, т. е., иными словами, от нагрузки машины, то величина сдвига щеток при различных нагрузках должна изменяться, что создает большие затруднения в эксплуатации машины. Более радикальным средством для улучшения коммутации являются дополнительные полюса, которые при этом должны быть рассчитаны так, чтобы помимо потока, уничтожающего поле реакции якоря, они создавали бы поток, вызывающий в коммутируемой секции эдс ек = —еr. Тогда нет никакой необходимости сдвигать щетки из геометрической нейтрали, и как реакция якоря, так и реактивное напряжение коммутации будут автоматически компенсироваться при любой нагрузке машины. Распределение полярностей дополнительных полюсов показано на рис. 59. Из чертежа видно, что в генераторах дополнительный полюс должен иметь ту же полярность, что и главный полюс, идущий за ним в направлении вращения якоря, а в двигателе — наоборот. В настоящее время дополнительные полюса являются обязательным элементом каждой м. п. т. за исключением самых малых мощностей, т. к. их применение, кроме устранения реакции якоря и улучшения коммутации, дает возможность построить машину с меньшим расходованием материала, т. е. экономически более выгодную.
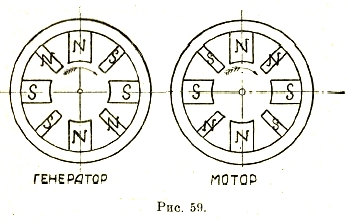
Рис. 59
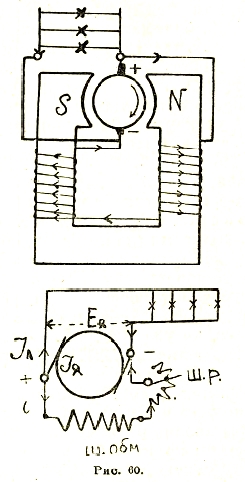
Рис. 60
Искрение на коллекторе может вызываться еще и другими причинами помимо указанной выше. Так, например, благодаря чисто механическим неисправностям (дрожание щеток, плохая притирка щеток и коллектора, истирание коллектора, слабое укрепление токоснимающих частей, неправильная форма коллектора) получается неплотный контакт между щеткой и коллектором, что вызывает появление маленьких вольтовых дуг, в результате чего наступает искрение. Кроме того, искрение может иметь место в том случае, если напряжение между соседними коллекторными пластинами превосходит допускаемые пределы (25—30 вольт).
Способы возбуждения м. п. т. Для возможности работы м. п. т., как уже указывалось выше, необходимо наличие магнитного потока, пересекающего при вращении якоря проводники его обмотки. Создание этого потока называется возбуждением машины. По способу возбуждения различают м. п. т. с независимым возбуждением и с самовозбуждением, причем в последнем случае возбуждение может быть последовательным (сериес), параллельным (шунт) и смешанным (компаунд). В машинах с независимым возбуждением ток, питающий обмотку полюсов, доставляется посторонним источником энергии, например другой машиной или батареей аккумуляторов. Генераторы с независимым возбуждением встречаются очень редко и лишь для специальных целей, нормальные же м. п. т. выполняются всегда с самовозбуждением. На рис. 60, 61 и 62 показаны схемы генераторов шунт, сериес и компаунд. Как видно из рис. 60, в шунтовом генераторе обмотка возбуждения присоединена непосредственно к щеткам машины, т. е. ток в ней устанавливается полным напряжением якоря. Для того, что бы ограничить величину этого тока, обмотку выполняют с большим сопротивлением, а для создания нормального потока, при небольшом значении тока, число витков обмотки возбуждения берут большим. (Как известно, величина потока, создаваемого какой-либо обмоткой, пропорциональна произведению из силы тока на число витков, т. е. числу ампер-витков). Для того, чтобы иметь возможность регулировать величину потока, а, следовательно, и величину напряжения машины, в цепь обмотки возбуждения включают регулируемое сопротивление (ШР на рис. 60), т. н. шунтовый реостат. В сериесном генераторе (рис. 61) обмотка возбуждения присоединена последовательно с обмоткой якоря и питается полным током машины. Для того, чтобы не создавать току якоря излишнего сопротивления при прохождении через обмотку возбуждения, последняя выполняется из толстого проводника, обладающего малым сопротивлением. Число витков сериесной обмотки также берут небольшим, т. к. необходимые ампер-витки создаются здесь, главным образом, за счет большого тока возбуждения. В компаундном генераторе (рис. 62) имеются обе обмотки: шунтовал и сериесная, и магнитный поток создается здесь одновременным действием и того и другого возбуждения. Схемы возбуждения двигателей будут даны ниже. Отметим, что генераторы п. т. выполняются почти исключительно шунтовыми и компаундными, а двигатели — шунтовыми и сериесными.
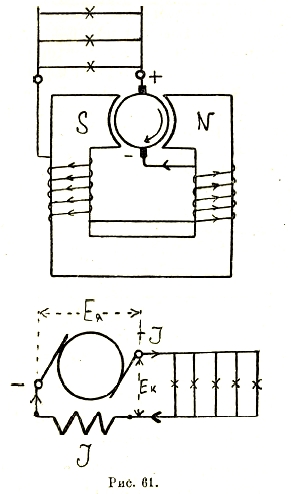
Рис. 61
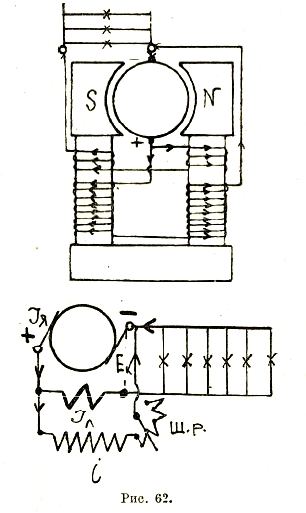
Рис. 62
Характеристики генераторов постоянного тока. Каждый тип машины характиризуется определенными рабочими свойствами, выражаемыми определенными зависимостями одних величин (например, эдс, напряжения, силы тока, числа оборотов и т. д.) от других (например, тока возбуждения, нагрузочного тока и т. д.). Эти зависимости в силу особых свойств магнитной цепи не могут быть, в большинстве случаев, выражены математическими уравнениями, и их приходится выражать графически в виде кривых, называемых характеристиками машины. Генераторы работают нормально с постоянной скоростью, поэтому характеристики, выражающие зависимости от числа оборотов, для генераторов не являются определяющими. Главнейшими кривыми следует здесь считать те, которые дают зависимость напряжения на зажимах машины от тока возбуждения и от нагрузочного тока. С одной из важнейших характеристик мы познакомились уже выше (рис. 55), — это характеристика намагничивания, в случае генератора называемая также характеристикой холостого хода. Последнее название возникло от того, что, если во вращающемся с нормальной скоростью ненагруженном генераторе изменять ток возбуждения и одновременно измерять с помощью вольтметра напряжение на зажимах машины, то, построив кривую зависимости между этими двумя величинами, мы и получим намагничивающую кривую. Действительно, напряжение при холостом ходе, вследствие отсутствия тока в якоре (в действительности якорь пропускает ток, необходимый для намагничивания машины, но величина его ничтожна по сравнению с током нагрузки), т. е. вследствие отсутствия падения напряжения и реакции якоря, численно равна (вернее, почти равна) эдс, которая в свою очередь пропорциональна магнитному потоку, а ток возбуждения пропорционален ампер-виткам возбуждения или напряженности магнитного поля. Описанным путем характеристика холостого хода может быть снята у генераторов с независимым возбуждением и у генераторов шунтовых или компаундных. У сериесных генераторов ток возбуждения одновременно является и током нагрузки, и поэтому здесь характеристику холостого хода можно снять, лишь отключив обмотку возбуждения от якоря и питая ее от независимого источника тока, т. е. превратив сериесное возбуждение в независимое. Если нагрузить машину, то при том же токе возбуждения напряжение на ее зажимах сделается меньше, чем при холостом ходе, т. к. часть эдс должна быть затрачена на преодоление падения напряжения в обмотке якоря и контактах коллектор-щетки в шунтовых машинах, а в сериесных и компаундных еще и на преодоление падения напряжения в обмотке возбуждения. Кроме того, сама эдс также уменьшится благодаря реакции якоря, возникающей при нагрузке. Если снять по-прежнему зависимость напряжения от тока возбуждения при некоторой постоянной нагрузке, то получится кривая, подобная характеристике холостого хода, но расположенная ниже ее, причем тем ниже, чем больше нагрузка. Кривые, дающие указанную зависимость при различных нагрузках, называются нагрузочными характеристиками. Очевидно, характеристика холостого хода есть частный случай нагрузочной характеристики при токе нагрузки, равном нулю. Наиболее важной и имеющей наибольшую практическую ценность является внешняя характеристика, представляющая зависимость между напряжением на зажимах и током внешней нагрузки при некотором постоянном сопротивлении цепи возбуждения и при постоянной скорости вращения, т. е. характеризующая как раз нормальный режим работы машины в установках. Внешняя характеристика для шунтовой машины показана на рис. 63 (кривая Ея).
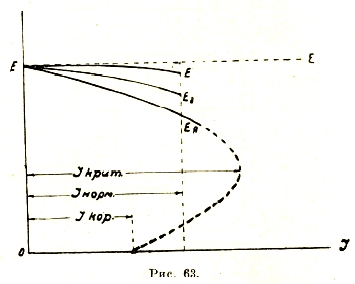
Рис. 63
Если бы при нагрузке машины не было бы ни падения напряжения в цепи якоря, ни реакции якоря, то не было бы никаких причин для изменения напряжения, и внешняя характеристика представляла бы собой прямую линию, параллельную оси абсцисс. Т. к., однако, указанные явления в действительности существуют, то с увеличением нагрузки напряжение будет уменьшаться. Это уменьшение будет несколько расти еще и за счет того, что при постоянном сопротивлении цепи возбуждения ток возбуждения при увеличении нагрузки будет падать, так как он устанавливается напряжением на зажимах. Если бы изменение напряжения обусловливалось только изменением тока возбуждения, то мы получили бы кривую Е1 (рис. 63), благодаря падению напряжения в цепи якоря получается дальнейшее снижение до кривой Е2 и, наконец, вследствие реакции якоря, действительное изменение будет происходить по кривой Ея. По мере возрастания нагрузки кривая Ея загибается все сильнее и, наконец, по достижении некоторой, т. н. критической силы тока напряжение падает настолько, что его уже недостаточно для самовозбуждения машины, кривая круто загибается, напряжение становится равным нулю, и ток будет поддерживаться только остаточным магнитизмом индуктора. Этот т. н. ток короткого замыкания обычно меньше тока нормальной нагрузки, хотя в некоторых случаях, например в больших машинах, он может быть и несколько больше Iнорм. В противоположность шунтовым машинам у генераторов сериес внешняя характеристика при увеличении нагрузки поднимается вверх, т. к. в этих машинах увеличение нагрузки связано с увеличением тока возбуждения. На рис. 64 кривая Е1 представляет собой характеристику холостого хода, кривая Е2 учитывает падение напряжения, а кривая Ея, учитывая еще и реакцию якоря, и является внешней характеристикой. Подъем кривой Ея совершается только до известного предела, т. к. в дальнейшем увеличение потока затрудняется насыщением магнитопровода, а падение напряжения и реакция якоря продолжают расти в той же степени. При некотором значении тока внешней нагрузки (ток короткого замыкания) напряжение падает до нуля. Ток короткого замыкания в сериесном генераторе может в несколько раз превосходить ток нормальной нагрузки и является поэтому опасным для целости обмоток машины. В генераторах компаунд напряжение создается как шунтовой обмоткой (обусловливающей падающую кривую), так и сериесной обмоткой (обусловливающей подъем кривой), поэтому внешняя характеристика этой машины может иметь различный характер в зависимости от того, действие какой обмотки преобладает.
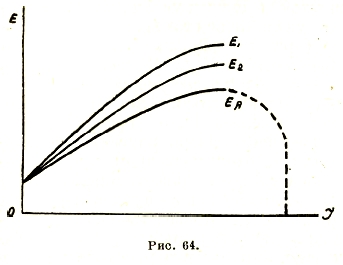
Рис. 64
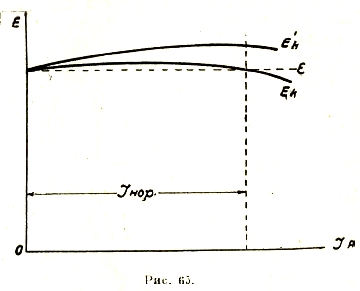
Рис. 65
На рис. 65 показаны две типичных внешних характеристики компаундного генератора: с небольшим сериесным действием (кривая Ek), когда напряжение остается почти постоянным независимо от нагрузки, и с сильным сериесным действием (перекомпаундирование), когда напряжение несколько растет с увеличением нагрузки.
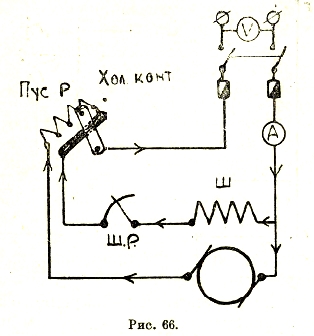
Рис. 66
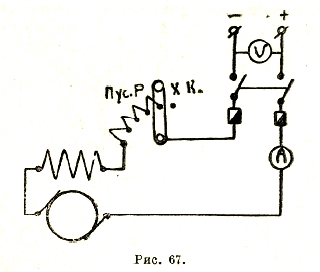
Рис. 67
М. п. т. как двигатель. Если зажимы м. п. т. присоединить к сети, то якорь ее придет во вращение и сможет тем самым совершать некоторую механическую работу за счет потребления электрической мощности из сети. Вращающий момент двигателя создается по закону Био-Савара (см. теоретические основы электротехники), вследствие взаимодействия между силовыми линиями магнитного поля машины и оживленными током проводниками обмотки якоря. Эта сила взаимодействия, будучи умножена на плечо (радиус якоря), и определяет собой вращающий момент двигателя. Следовательно, М = С1ФІя , где Ф — магнитный поток, Ія — сила тока в якоре и С1 — постоянная величина, зависящая от конструкции машины. При равномерной скорости вращения момент, развиваемый двигателем, должен вполне уравновешиваться моментом сопротивления нагрузки; если же момент вращения больше или меньше момента сопротивления, то якорь будет ускорять или замедлять свое вращение, пока не наступит равновесие. Схема включения шунтового двигателя показана на рис. 66. Здесь Ш — шунтовая обмотка возбуждения, ШР — реостат для регулирования тока возбуждения, Пус. Р — пусковой реостат, Хол. конт. —холостой контакт пускового реостата. Назначение пускового реостата будет выяснено ниже. На рис. 67 показана, схема включения сериесного двигателя. Если находящийся в покое двигатель сразу присоединить к полному напряжению сети, то в него пойдет ток, определяемый равенством Iя = V/R, где V — напряжение сети, а R — сопротивление якоря, контакта коллектор-щетки, а в сериесных двигателях еще и обмотки возбуждения. Т. к. сопротивление R весьма мало, то ток Iя может оказаться в несколько раз больше тока нормальной нагрузки, что могло бы привести к выгоранию обмоток. При работе двигателя положение изменяется, т. к., благодаря пересечению проводниками якоря силовых линий поля, в обмотке якоря индуктируется эдс, которая, как легко убедиться, воспользовавшись правилами левой и правой руки, направлена в сторону, противоположную напряжению, вследствие чего ее называют противоэлектродвижущей силой (пэдс). Следовательно, при вращении якоря ток будет равен
Iя = (V-Е)/R, где Е — пэдс. Т. к. вращающий момент пропорционален силе тока Ія, то, очевидно, двигатель будет при нагрузке вращаться с такой скоростью, чтобы пэдс имела величину, ограничивающую ток двигателя до необходимой величины, определяющей нужный момент вращения. Если момент вращения должен увеличиться, то должен увеличиться ток Ія , а, следовательно (при постоянных V и R), должна уменьшиться пэдс Е, т. е. двигатель должен сбавить свою скорость, и наоборот. С целью ограничения тока при пуске двигателя в ход, когда вследствие неподвижности якоря пэдс еще не наводится, необходимо на время пуска включить последовательно с якорем добавочное сопротивление — пусковой реостат (рис. 66 и 67), которое по мере разворачивания двигателя постепенно выключается. У пускового реостата устраивают холостой контакт, ставя на который ручку реостата размыкают цепь тока и тем самым останавливают машину. В шунтовых машинах пусковой реостат снабжается еще дополнительной полосой из меди, которая служит для постоянного соединения между сетью и обмоткой возбуждения. Если бы этой полосы не было и обмотка возбуждения присоединялась бы за пусковым реостатом, то при включении двигателя ток возбуждения, а, следовательно, и магнитный поток, были бы меньше нормальной величины, и вращающий момент при пуске (пусковой, или начальный момент) был бы сильно снижен. Т. к. пэдс определяется, как и у генератора, формулой
![]()
где С2 — постоянная для данной машины величина, то n = 1/C2 · E/Ф, т. е. число оборотов двигателя пропорционально пэдс и обратно пропорционально магнитному потоку Ф. Выше мы имели формулу Iя = (V-Е)/R, откуда следует, что Е = V — Ія R. Тогда для числа оборотов мы можем еще получить выражение
![]()
Таким образом, регулирование числа оборотов двигателя можно осуществить уменьшением магнитного потока. Этот способ весьма легко использовать в шунтовом двигателе путем регулирования тока возбуждения с помощью шунтового реостата (рис. 66). В сериесных двигателях это регулирование можно осуществить по одному из способов, показанных на рис. 68, т. е. включая сопротивление или в общую цепь машины (уменьшая силу тока, протекающего через двигатель), или параллельно обмотке возбуждения (уменьшая силу тока возбуждения). Эти способы неэкономичны, т. к. вызывают большие потери энергии в реостате и тем самым уменьшают к. п. д. двигателя. Поэтому, при необходимости регулирования числа оборотов у сериесных двигателей, их спаривают и включают в сеть либо последовательно (рис. 69 вверху), либо параллельно (рис. 69 внизу). Тогда в первом случае к каждому двигателю подводится лишь половина напряжения сети, и число оборотов уменьшается (согласно формулы n = 1/C2 · (V-IяR)/Ф) почти вдвое.
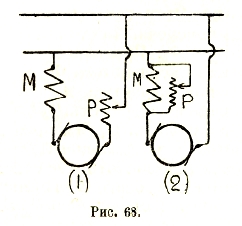
Рис. 68
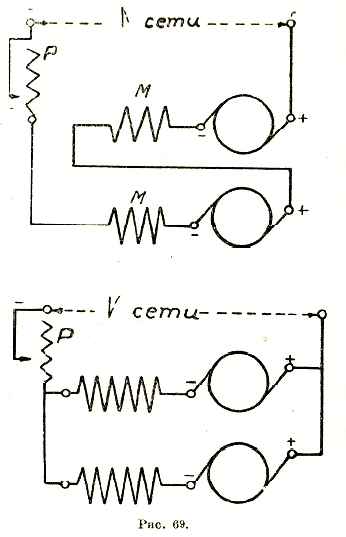
Рис. 69
Такой способ регулирования (иногда не с двумя, а с несколькими двигателями) часто применяется в крановых установках и всегда для трамваев и электрических поездов, где переключение производится с помощью контроллеров.
Характеристики двигателей постоянного тока. Работа двигателей совершается обычно при постоянном напряжении сети, и поэтому нас интересуют здесь главным образом зависимости числа оборотов и вращающего момента от нагрузки. У шунтовых двигателей число оборотов с нагрузкой уменьшается мало. Из выражения
![]()
следует, что при увеличении Ія числитель уменьшается, но знаменатель также уменьшается, т. к реакция якоря ослабляет поток возбуждения. Обычно числитель уменьшается несколько быстрее, и n с нагрузкой несколько падает. В сериесных двигателях с нагрузкой резко возрастает поток Ф, т. е. знаменатель сильно увеличивается. Уменьшение же числителя относительно невелико, и поэтому здесь число оборотов с нагрузкой падает весьма резко. Что касается величины вращающего момента М= С1IЯ Ф, то для шунтовых двигателей, у которых поток весьма мало зависит от нагрузки, можно приблизительно считать Ф = const, и тогда М = С3 · Ія , т. е. момент пропорционален здесь первой степени тока. Для сериесных двигателей, у которых поток приблизительно пропорционален силе тока нагрузки, можно написать М = С4 Ія2, т. е. момент пропорционален здесь квадрату силы тока, другими словами — увеличивается с нагрузкой очень резко. Обратим внимание еще на одну особенность сериесного двигателя. Если такой двигатель запустить вхолостую, то через его якорь будет проходить весьма малый ток, т. к. момент сопротивления будет обусловлен только потерями и потребует очень небольшого момента вращения. Т. к. ток якоря одновременно является и током возбуждения, то вызванный им поток также будет почти равен нулю, что на основании предыдущей формулы вызовет повышение числа оборотов до недопустимо большого значения, опасного для механической прочности двигателя. Это явление называется разносом. Если по условиям эксплуатации требуется иметь сериесный двигатель, который допускал бы работу вхолостую, то прибегают к устройству небольшой дополнительной шунтовой обмотки (т. е. берут компаундный двигатель), которая ограничивала бы число оборотов холостого хода. Здесь обе обмотки создают поток, направленный в одну и ту же сторону. Иногда встречаются двигатели компаундного типа с встречным соединением обмоток, где потоки шунтовой и сериесной обмоток направлены в разные стороны. Такие двигатели применяются, если желательно сохранить постоянное число оборотов, независимо от нагрузки.
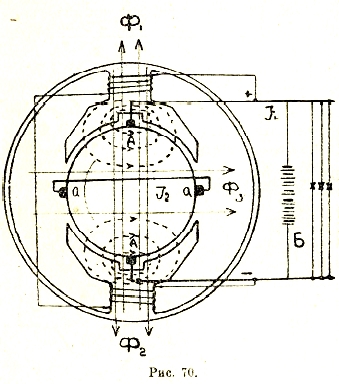
Рис. 70.
Специальные машины постоянного тока. Мы рассмотрим здесь лишь машины для освещения поездов и для электросварки. Машины для освещения поездов должны давать неизменный ток независимо от скорости движения поезда. Наиболее распространенным типом такой машины является машина Розенберга (рис. 70). Обмотка полюсов создает поток Ф1, направленный снизу вверх. При вращении якоря этот поток создает на щетках а—а напряжение, заставляющее протекать по обмотке якоря ток, т. к. щетки а—а замкнуты накоротко. Этот ток создает в свою очередь поперечный поток (поток реакции якоря) Ф3. При пересечении проводниками якоря потока Ф3 создается напряжение на щетках А — А, питающее током внешнюю сеть. Ток внешней нагрузки, проходя через якорь, создает свой поток Ф3, направленный против Ф1. Т. к. магнитное сопротивление поперечному потоку Ф3, благодаря сильно развитым полюсным наконечникам, невелико, то этот поток достигает здесь большой величины. Если так рассчитать машину, чтобы продольный поток Ф1— Ф2 при нормальном режиме составлял бы лишь около 10% от потока Ф1 то возрастание рабочего тока будет ограничено, т. к. иначе разность Ф1— Ф2 сделается настолько малой, что никакой эдс на щетках а—а индуктироваться не будет. Если ток нагрузки по какой-либо причине упадет, то разность Ф1— Ф2 увеличится, что вызовет увеличение напряжения на щетках а—а и возрастание поперечного потока. Последнее обстоятельство, в свою очередь, вызовет увеличение напряжения на щетках А—А, что снова заставит увеличиться рабочий ток во внешней цепи. Таким образом, несмотря на изменение числа оборотов, сила тока во внешней цепи будет поддерживаться постоянной. При остановке поезда питание сети с помощью особого автомата переходит к батарее аккумуляторов, показанной на чертеже справа и заряжаемой во время хода поезда.В машинах для электросварки необходимо иметь неизменную, в некоторых пределах, силу тока, независимо от величины напряжения на зажимах. Эта задача может быть решена несколькими путями. Ниже описан сварочный агрегат американской фирмы Вестингауз.
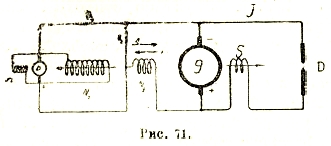
Рис. 71.
Как видно из рис. 71, здесь на одном валу сидят три машины: генератор G, возбудитель В и двигатель А, вращающий весь агрегат. Генератор G имеет 3 обмотки возбуждения: обмотка N1 питается от возбудителя В, обмотка N2 питается одновременно от возбудителя В и от самого генератора G и, наконец, обмотка S питается рабочим током генератора G. Последняя обмотка создает поле, направленное противоположно полю обмотки N1 т. е. обмотка S является противокомпаундной. Обмотка N1 создает полезный поток. Обмотка N2 может обтекаться током в разных направлениях, в зависимости от величины сопротивления вольтовой дуги D. При разомкнутых электродах дуги (или при нормальной длине дуги) обмотка N2 возбуждается главным образом генератором G и создает поле, направленное в ту же сторону, что и поле N1, (стрелка 1). При коротком замыкании дуги D напряжение на щетках генератора G почти падает до нуля, и ток в обмотке N2 устанавливается возбудителем В в обратном направлении (стрелка 2), и поток генератора G ослабляется. На рис. 72 показаны внешние характеристики при различных возбуждениях, из которых видно, что сила тока, начиная от некоторого напряжения до нуля, остается приблизительно постоянной.
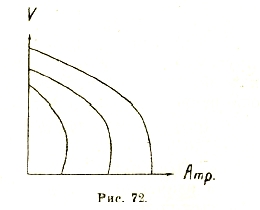
Рис. 72
Конструкции э. м. п. т. На рис. 73 показана машина постоянного тока фирмы Сименс-Шуккера 20 квт, n = 1 250. Слева и справа стоят подшипниковые щиты, посередине — корпус, у которого видны главные (широкие) и дополнительные (узкие) полюса. Рядом стоит крышка, прикрывающая зажимы (видны слева на корпусе) На переднем плане слева расположен якорь с обмоткой и коллектором. На якоре слева сидит вентилятор, служащий для продувания воздуха через машину с целью ее охлаждения во время работы. Справа внизу — щеточная траверза с 6 щетками на каждом из 4 пальцев (машина имеет 4 полюса).
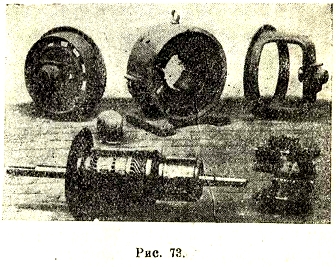
Рис. 73
Рис. 74.
На рис. 74 показан мощный электродвигатель того же завода на 5 000 кВт при 100 об/мин. предназначенный для привода прокатного стана. Диаметр якоря этой машины 1 900 мм, диаметр коллектора 1 450 мм. На рис. 75 показан щеткодержатель со щеткой размером 32х16 мм. Таких щеткодержателей, как видно из рис. 73 и 74, на каждый палец насаживается несколько.

Рис. 75
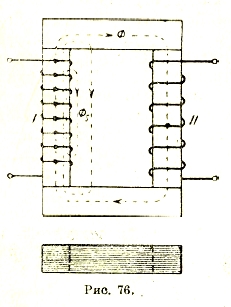
Рис. 76
Трансформаторы (трансформаторы). Холостой ход трансформатора. На рис. 76 показан в схематическом виде однофазный трансформатор, состоящий из замкнутого магнитопровода (сердечника), изготовляемого во избежание больших потерь на перемагничивание из тонких, изолированных друг от друга листов железа, и из двух обмоток, первичной (I) и вторичной (II). Обмотки расположены на боковых частях сердечника, т. н. стержнях. Верхняя и нижняя части сердечника, не несущие обмотки и служащие лишь для замыкания магнитной цепи, называются ярмами. Предположим, что внешние зажимы вторичной обмотки разомкнуты, и подведем к зажимам первичной обмотки напряжение сети. Такой режим работы трансформатора называется холостым ходом. Под влиянием приложенного напряжения в первичной обмотке будет проходить ток, который, будучи переменным, создаст в магнитопроводе трансформатора переменный магнитный поток. Т. к. магнитное сопротивление трансформатора невелико (вследствие отсутствия воздушных промежутков, необходимых во вращающихся машинах), то для создания потока потребуется ток незначительной величины. Пульсирующий поток, будучи сцеплен с витками вызывающей его обмотки, наводит в ней эдс самоиндукции, направленную противоположно приложенному напряжению, т. к. она, как и всякая эдс самоиндукции, стремится препятствовать прохождению тока. Т. к. железо трансформатора не обладает все же бесконечно большой магнитной проницаемостью, то часть силовых линий потока (хотя и незначительная) будет замыкаться вокруг обмотки непосредственно (поток Фs на рис. 76), в то время как другая, большая часть (поток Ф) будет проходить исключительно в железе. Магнитная проницаемость воздуха постоянна, и поэтому поток Фs будет пропорционален току первичной обмотки, связь же между потоком Ф и током определяется кривой намагничивания, т. е. насыщением железа. Поэтому, целесообразно действие потоков Ф и Фs т. е. наведение ими эдс самоиндукции, рассматривать отдельно, т. е. предполагать, что в первичной обмотке индуктируются 2 эдс: E1 — от «главного потока» Ф и эдс рассеяния Е1s — от «потока рассеяния» Фs. Эдс Е1 как известно (см. теоретические основы электротехники), определяется формулой Е1 = 4,44fw1·10-8. Здесь E1 —эффективное значение эдс, f — частота тока, W1 — число витков первичной обмотки, Ф — амплитуда потока. По общему правилу, эдс E1 отстает от вызывающего ее потока на угол 90°. Эдс Е1s, вызываемая потоком Фs , так же как и он пропорциональна току первичной обмотки. Обозначая этот ток при холостом ходе через Iμ можно написать, что Е1s = х1 Iμ, где x1 — коэффициент пропорциональности, зависящий от скорости изменения потока (т. е. частоты тока) и от коэффициента самоиндукции обмотки, определяющего величину потока Фs. Как известно, x1=ωS1, где ω – круговая частота тока = 2πf, а S1 - самоиндуктивность рассеяния. Т. к. x1 = Е1s/ Iμ имеет размерность сопротивления, то его часто называют индуктивным сопротивлением первичной обмотки. Подведенное к первичной обмотке напряжение V1 должно уравновесить таким образом эдс Е1 и эдс Е1s. Т. к. при прохождении тока Iμ через первичную обмотку в ней благодаря наличию омического сопротивления R1 возникает падение напряжения Iμ R1, то напряжение V1 должно покрыть и эту потерю. Таким образом, мы приходим к следующей диаграмме трансформатора при его холостом ходе (рис. 77). По горизонтали отложен ток Iμ и в фазе с ним поток Ф. Эдс Е1 отстает от потока на угол 90° и поэтому отложена вниз по вертикали. Составляющая напряжения, уравновешивающая E1, направлена поэтому по вертикали вверх (на диаграмме — Е1). В ту же сторону направлена составляющая IμωS1 = Iμ x1, уравновешивающая эдс рассеяния Е1s. В фазе с током отложена составляющая напряжения Iμ R1 компенсирующая падение напряжения в первичной обмотке. Замыкающая этих трех векторов и дает нам по величине и по фазе напряжение у зажимов первичной обмотки V1. Т. к. величина омического падения напряжения весьма мала по сравнению с векторами Е1 и E1s , то угол φ почти равен 90°, т. е. Iμ является почти чисто реактивным током. Вторичная обмотка трансформатора, как видно из рис. 76, пронизывается главным потоком Ф, благодаря чему в ней также наводится эдс взаимоиндукции. Е2 = 4,44fw2Ф10-8, где w2 — число витков вторичной обмотки. Ни эдс рассеяния, ни омического падения напряжения во вторичной обмотке нет, т. к. ее зажимы разомкнуты и, следовательно, в ней нет тока и собственного потока. Отношения эдс Е, и Е2
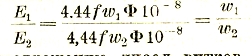
равно отношению чисел витков соответственных обмоток. Благодаря небольшой величине тока Iμ а, следовательно, и потока рассеяния и омического падения напряжения, можно считать, что при холостом ходе Е~ V1. Т. к., кроме того, эдс Е2 является напряжением на зажимах вторичной обмотки при холостом ходе, т. е. Е2=V2, то

Это отношение называется коэффициентом трансформации, или передаточным числом трансформатора, и обычно обозначается буквой u. Отметим еще, что до сих пор мы предполагали, что весь ток холостого хода идет исключительно на создание потоков Ф и Фs, тогда как в действительности этот же ток должен покрывать еще и потери в железе (на гистерезис и токи Фуко). Другими словами, ток холостого хода должен иметь две составляющих — активную, покрывающую потери, и реактивную, создающую поле. Т. к. первая составляющая обычно гораздо меньше второй и, кроме того, они сдвинуты по фазе на 90°, то их результирующая, действительный ток холостого хода I0 = √(Iμ + Ih) ≈ Iμ. В дальнейшем, при построении полной диаграммы при нагрузке это обстоятельство будет учтено.

Рис. 77
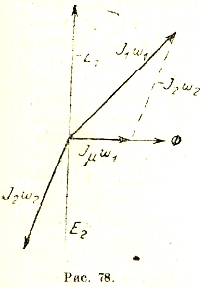
Рис. 78
Нагрузка трансформатора. Если вторичные зажимы трансформатора замкнуть на какое-либо сопротивление (активное, реактивное или смешанное), то под влиянием эдс Е2 через это сопротивление пойдет ток, и трансформатор нагрузится, т. е. будет отдавать мощность во вторичную цепь. В силу закона сохранения энергии первичная обмотка должна при этом увеличить потребление мощности из первичной сети, т. к. за вычетом потерь в самом трансформаторе обе мощности должны быть равны. Если напряжение V1 постоянно, то увеличение потребления мощности может идти лишь за счет увеличения силы тока первичной обмотки. Т. к. разница между V1 и Е1, обусловленная омическим падением напряжения I1R1 и эдс рассеяния E1s = I1x1 (эту величину мы будем в дальнейшим называть индуктивным падением напряжения) даже при значительной величине I1 невелика (всего несколько процентов), то можно приближенно считать эдс Е1 постоянной, а, следовательно, постоянным и поток Ф, вызывающий эту эдс. Другими словами, мдс AWm = Iμw1 при всех режимах работы должна оставаться приблизительно постоянной. Т. к. эта мдс доставляется первичной обмоткой, то при увеличении тока I2, т. е. мдс I2w2 во вторичной обмотке, в первичной обмотке должен появляться дополнительно такой ток I1', чтобы созданная им мдс I1'w1, была равна и противоположна I2w2. Таким образом, полную мдс первичной обмотки I1w1, можно представить себе состоящей из геометрической суммы

Другими словами, мдс холостого хода должна быть равна геометрической сумме первичной и вторичной мдс. Сказанное иллюстрирует диаграмма мдс, показанная на рис. 78. Т. к. при нормальной работе трансформатора Iμw1 невелико по сравнению с I1w1 и I2w2, то, полагая приближенно I1w1= I2w2, можно написать
![]()
Коли бы первичные и вторичные витки были одинаковы (ω1=ω2), то диаграмма мдс являлась бы одновременно диаграммой токов. Кроме того, эдс Е1 и Е2 выражались бы на диаграмме напряжений отрезками одинаковой длины. При этом как начертание диаграммы, так и ее анализ значительно бы упростились. Поэтому в действительных условиях, когда ω1≠ω2, прибегают к помощи т. н. приведенных величин. Если разделить все мдс на диаграмме рис. 78 на ω1 то мы получим диаграмму трех токов:
I1, Iμ, I2’=I2 w2/w1
Величина I2’ называется приведенным током вторичной обмотки. Величину приведенной эдс вторичной обмотки Е2’ мы найдем из условия равенства вторичных мощностей действительного и приведенного трансформатора
E2I2 = E2’I2’
откуда E2’ = E2 I2/I2’ или, так как I2/I2’ = w1/w2, то E2’ = E2 w1/w2
Т. к., кроме того E2 w1/w2 = Е1, то E2’ = E1
Приведенные вторичные сопротивления получаются, как
r’2 = r2(w1/w2)2 и r’2 = х2(w1/w2)2, т.к. сопротивление определяется отношением напряжения к току, а w1/w2 : w2/w1 = (w1/w2)2.
Вводя во вторичную цепь приведенные величины вместо действительных, мы, не нарушая условий работы, значительно упрощаем все исследования. При прохождении тока во вторичной обмотке в ней также возникает омическое падение напряжения I2R2, (или I2’R2’) и эдс рассеяния E2s = I2ωS2 = I2x2 (или E2s’ = I2’х2’), вызываемая полем рассеяния вторичной обмотки и проявляющаяся в виде индуктивного падения напряжения. Вычитая из Е2 величины I2х2 и I2R2, мы получаем вторичное напряжение трансформатора V2. В действительности явление рассеяния протекает в трансформаторе несколько сложнее, и в некоторые моменты времени оба потока рассеяния, вторичный и первичный, создаются лишь одной обмоткой, но при построении диаграмм и исследовании работы трансформатора результаты остаются совершенно одинаковыми и при той, и при другой картине рассеяния, т. к. нам важны не самые потоки рассеяния, а те индуктивные падения напряжения, которые ими вызываются.
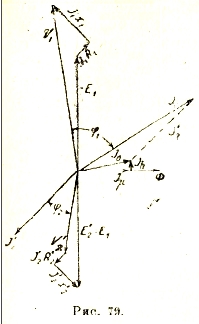
Рис. 79
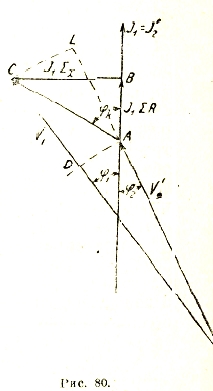
Рис. 80
Построение диаграммы трансформатора при нагрузке показано на рис. 79, где нагрузка вторичной цепи предположена индуктивной, т. е. ток отстает от напряжения на угол φ2. Сперва чертим вектор вторичного приведенного тока I2’, затем под углом φ2 к нему откладываем приведенное вторичное напряжение V2'. От конца вектора V2' откладываем в фазе с током приведенное омическое падение напряжения во вторичной обмотке I2’R2’и под углом в 90° к току приведенное вторичное индуктивное падение напряжения I2’х2’. Замыкающая этих трех векторов дает нам приведенную вторичную эдс Е2’. Под углом 90° к Е2’ в сторону опережения откладываем магнитный поток Ф и в фазе с ним — реактивную составляющую тока холостого хода (т. н. намагничивающий ток). Отложив от конца Iμ активную составляющую тока холостого хода Іh (под углом 90°), получаем результирующий ток холостого хода I0. Далее, отложив от конца I0 вектор — I2’, получаем первичный ток І1. Первичная эдс Е1, равная E2’, должна быть также отложена вниз. В противоположную сторону откладываем вектор — Е1, составляющую первичного напряжения, уравновешивающую эдс Е1. Наконец, откладывая от конца — Е1 омическое падение напряжения I1R1 (в фазе с током) и индуктивное падение напряжения (под углом 90° к току), получаем в качестве замыкающей стороны вектор первичного напряжения V1. Сдвиг фаз между током и напряжением первичной цепи определяется углом φ1. Таким же точно образом строятся диаграммы и для безиндукционной или емкостной нагрузки вторичной цепи. Если пренебречь током холостого хода и повернуть нижнюю часть диаграммы рис. 79 так, чтобы совпали векторы E2’ и — Е1, то получится чертеж, показанный на рис. 80. Т. к. при I0=0, I1=I2’, то сумма омических падений напряжений первичной и вторичной обмоток будет составлять
![]()
и будет равна вектору АВ. Точно так же сумма индуктивных падений напряжения выразится уравнением
![]()
и будет равна вектору ВС. Вектор АС даст нам полное падение напряжения в трансформаторе I1∑z. Если теперь из точки О описать дугу радиусом ОА, то отрезок CD даст нам величину падения напряжения в трансформаторе V1-V2.
Короткое замыкание трансформатора. Под нормальным коротким замыканием трансформатора понимается режим, при котором вторичная обмотка замкнута коротко, а к первичной обмотке подведено такое пониженное напряжение V1k, которое устанавливает во вторичной обмотке ток нормальной величины (I2k = I2норм). Т. к. при этом V2 = 0, то эдс Е2 должна покрывать только омическое и индуктивное падение напряжения. Для создания такой эдс потребуется весьма малый поток, а, следовательно, и незначительный ток холостого хода. Поэтому при коротком замыкании I1 еще менее отличается от І2’, чем при нормальной работе, и практически оба тока будут равны. Таким образом, пренебрегая током І0, можно считать, что при коротком замыкании напряжение V1k уравновешивает лишь падение напряжения в обеих обмотках. На рис. 80 полное падение напряжения в трансформаторе изображается отрезком АС. Поэтому, если диаграмма построена для нормального тока, то при нормальном коротком замыкании вектор АС представит собой первичное напряжения V1k. Таким образом, треугольник АВС представляет собой диаграмму короткого замыкания. На этом основании ∑r = r1 + r2’ обозначают через rk и называют омическим сопротивлением короткого замыкания. Аналогично, индуктивным сопротивлением короткого замыкания называют величину хk = ∑х = x1 + x2’ и кажущимся сопротивлением короткого замыкания zk = z1 + z2’. Весь треугольник ABC называется треугольником короткого замыкания. Из рис. 80 следует, что
![]()
У современных трансформаторов напряжение короткого замыкания V1k составляет обычно от 3 до 8% нормального первичного напряжения V1.
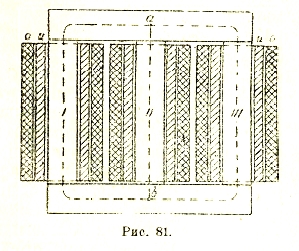
Рис. 81
Трехфазные трансформаторы. Для трансформирования трехфазного тока можно взять три однофазных трансформатора и соединить их обмотки между собой в звезду или треугольник. Такая система иногда применяется для мощных устройств, с целью повысить эксплуатационные удобства, в частности уменьшить резерв. Однако, нормальным типом трехфазного трансформатора следует в настоящее время считать показанную на рис. 81 конструкцию, в которой имеется три стержня, связанных верхним и нижним ярмами в один общий магнитопровод. На каждом стержне расположены обе обмотки (высокого напряжения о и низкого напряжения и) одной фазы. Отметим, кстати, что такая же система расположения на каждом стержне обеих обмоток всегда применяется и в однофазных трансформаторах с целью уменьшения рассеяния. Первичные и вторичные обмотки отдельных фаз и здесь соединяются в звезду или треугольник. Т. к. три напряжения трехфазной системы в сумме равны нулю, то и сумма возбужденных ими трех магнитных потоков также равна нулю, чем и объясняется возможность выполнения сердечника по рис. 81. Т. к. пути прохождения потока для всех фаз неодинаковы (расстояние от а до b для крайних фаз больше, чем для средней), то и намагничивающие токи всех фаз неодинаковы, что, впрочем, благодаря ничтожной величине Іμ не имеет никакого практического значения. Все найденные нами выше соотношения для однофазного трансформатора в полной мере применимы для каждой фазы трехфазного трансформатора и поэтому, например, диаграмма трехфазного трансформатора будет представлять собой совокупность трех одинаковых однофазных диаграмм. Однако, если нагрузки всех трех фаз будут не одинаковы, то различными будут и диаграммы для каждой фазы. Первичная и вторичная обмотки трехфазного трансформатора могут быть соединены следующим образом: обе в звезду, обе в треугольник, первичная в звезду — вторичная в треугольник, или первичная в треугольник — вторичная в звезду. Соединение треугольником имеет то преимущество, что при порче обмотки одной фазы питание всех трех фаз вторичной цепи не нарушается. С другой стороны, при соединении звездой каждая обмотка находится под напряжением в √3 раз меньше, чем линейное, благодаря чему облегчается задача конструктора в отношении изоляции, что особенно важно при очень высоких напряжениях. При соединении звездой часто выводят еще и нулевой провод для того, чтобы иметь возможность использовать фазовое напряжение для ламп накаливания, а междуфазовое — для питания двигателей. При этом, однако, легко может быть нарушена симметрия нагрузок отдельных фаз, что вызовет искажение напряжений, т. е. повышение напряжения одних фаз за счет понижения его в других фазах. С точки зрения неравномерных нагрузок более выгодными являются соединения треугольник-треугольник, звезда — треугольник и звезда—звезда без нулевого провода. Для того, чтобы питать от одного трансформатора две сети с различными напряжениями, в настоящее время применяют трехобмоточные трансформаторы, имеющие одну первичную и две вторичных обмотки, сидящие на одном стержне. Каждая из трех обмоток может быть соединена или в треугольник, или в звезду. При равномерной нагрузке всех трех фаз, мдс первичной обмотки равна геометрической сумме обеих вторичных мдс (если пренебречь током холостого хода).
Параллельная работа трансформаторов. В тех случаях, когда два или несколько трансформаторов должны работать параллельно, требуется соблюдение определенных условий, а именно: напряжения вторичных обмоток должны быть равны при холостом ходе и при нагрузке. Последнее условие требует одинаковости, падений напряжений, т. е., другими словами, одинаковости треугольников короткого замыкания. Оба эти условия диктуются требованием, по которому нагрузки параллельно работающих трансформаторов должны распределяться пропорционально их мощностям. Кроме того, сдвиг фаз между вторичными напряжениями у всех трансформаторов должен равняться нулю, т.к. иначе даже при равенстве напряжений появится некоторая разность потенциалов, вызывающая уравнительные токи между трансформаторами. В трехфазных трансформаторах вторичные напряжения можно сделать совпадающими по фазе, когда включения первичных и вторичных обмоток одинаковы, например: первичные везде звездой или треугольником и вторичные всегда треугольником или звездой. Никоим образом нельзя включать первичные обмотки одинаково, т. е. все звездой или все треугольником, а вторичные обмотки смешанно, т. е. одни звездой, а другие — треугольником. Наоборот, можно соединить для параллельной работы два трансформатора, у одного из которых включение обмоток будет звезда—звезда, а у другого треугольник—треугольник. Для удобства регулирования напряжения в сетях и для достижения правильного распределения нагрузок в параллельно работающих трансформаторах, на стороне высокого напряжения устраняются дополнительные выводы, которые позволяют включать и выключать определенное число витков и тем регулировать напряжение (обычно в пределах ± 5 %).
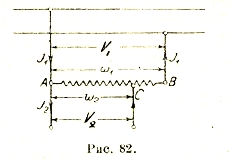
Рис. 82
Автотрансформаторы. В обычных трансформаторах обмотки высокого и низкого напряжения устраиваются совершенно отдельными и изолированными друг от друга. Можно, однако, обойтись всего одной обмоткой, как показано на рис. 82. Такая конструкция называется автотрансформатором. Если напряжение V1 подведено к точкам А и В, т. е. к концам обмотки, то между точками A и С будет действовать напряжение V2, которое так относится к V1 как число витков w2 относится к числу витков w1. Если ток «первичной» обмотки (АВ) составляет I1 ампер и ток вторичной нагрузки составляет I2 ампер, то в части АС протекает разность токов I2 — I1, так как токи I1 и I2, как и у всякого трансформатора, сдвинуты по фазе почти на угол 180°. Вследствие этого сумма потерь в автотрансформаторе меньше, чем в обычном трансформаторе с двумя отдельными обмотками, по которым проходят токи I1 и I2. Кроме того, у обычного трансформатора вся энергия трансформируется электромагнитным путем, т. е. через посредство общего для обеих обмоток магнитного потока Ф. У автотрансформатора же часть энергии первичной цепи непосредственно переходит во вторичную, и только другая часть передается электромагнитно. Вследствие этого размеры и вес автотрансформатора меньше, а кпд больше, чем у обычного трансформатора той же мощности. Полная вторичная мощность автотрансформатора
![]()
Мощность W2’ = W2 (u-1)/u передается трансформаторным путем, а мощность W2” = W2 1/u - непосредственно из первичной сети. Следовательно, при одном и том же весе автотрансформатор может дать мощность в u/(u-1) большую, чем трансформатор с двумя обмотками. Очевидно, это преимущество тем заметнее, чем меньше коэффициент трансформации u. Поэтому главное применение автотрансформаторы находят при небольших коэффициентах трансформации (обычно до u = 3 и меньше). Показанную на рис. 82 схему можно применить и для повышения напряжения, если питать автотрансформатор в точках А и С в брать от него энергию в точках А и В. Само собой разумеется, что автотрансформаторы могут применяться и для трехфазного тока.
Рис. 83.
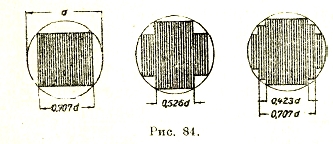
Рис. 84
Конструкции трансформаторов. Для того, чтобы иметь возможность изготовить обмотку трансформатора заранее на шаблоне, необходимо сердечник трансформатора сделать разъемным. При этом, однако, стыки должны быть достаточно плотные, чтобы не увеличивать магнитное сопротивление и тем самым не получать слишком большой намагничивающий ток. Стыки между стержнями и ярмом устраивают либо по типу левого чертежа рис. 83 (тупой стык), когда листы стержня плотно прилегают к ярму и стягиваются в таком положении боковыми болтами, либо по типу правого чертежа того же рис. 83 (стык в переплет), когда отдельные листы стержня входят между листами ярма. Формы сечения стержней показаны на рис. 84. В небольших трансформаторах можно ограничиться квадратной формой сечения, при больших же мощностях берут ступенчатую форму, чтобы лучше использовать пространство внутри обмотки, обмотки трансформаторов устраивают либо по типу цилиндрических, либо по типу дисковых. Цилиндрическая, обмотка показана на рис. 85. Здесь обмотки высокого и низкого напряжения расположены концентрически одна внутри другой, причем ближе к железу помещают обмотку низкого напряжения, т. к. ее легче изолировать от стержня. Для уменьшения рассеяния можно обмотку низкого напряжения разделить на два цилиндра, между которыми размещается обмотка высокого напряжения, как показано на рис. 86. В случае дисковой обмотки имеется ряд плоских катушек, принадлежащих по очереди высокому и низкому напряжению (рис. 87). Для лучшей изоляции обмотку конструируют так, чтобы крайние катушки принадлежали к низкому напряжению, причем для уменьшения рассеяния крайние катушки устраивают с половинным числом витков.
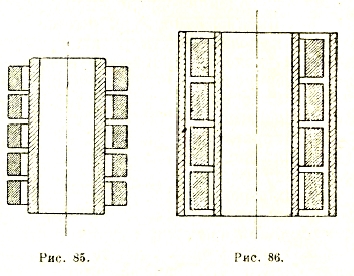
Рис. 85. Рис. 86
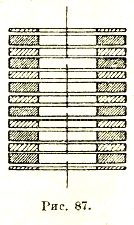
Рис. 87
Рис. 88
На рис. 88 показан полуобмотанный сердечник трехфазного трансформатора на 500 кВа, 6 000 400 В. Здесь на левом стержне имеются уже обе обмотки, на среднем — только обмотка низкого напряжения, а правый стержень еще не обмотан. Тот же трансформатор в готовом виде показан на рис. 89. Этот трансформатор помещается затем в железный бак (на чертеже слева), заполненный маслом и имеющий для лучшего охлаждения ребристые стенки. При еще больших мощностях и такого способа охлаждения уже недостаточно, и приходится в бак помещать систему труб с проточной водой. Подобная конструкция трехфазного трансформатора мощностью 6 000 ква показана на рис. 90, где в верхней части ясно видна система ребристых (для лучшей теплопередачи) охлаждающих труб.
Рис. 89
Рис. 90
Асинхронные двигатели (а. д.). Статор а. д. имеет обычную обмотку переменного тока (см. выше). В громадном большинстве случаев а. д. устраивается трехфазным, и тогда его обмотка создает при питании трехфазным током вращающееся магнитное поле. Обмотка ротора выполняется или в виде беличьего колеса, или в виде двухслойной обмотки трехфазного тока. Вращающееся поле статора вызывает в роторной обмотке токи, которые, взаимодействуя с магнитным потоком, и создают вращающий момент двигателя. Направление вращения может быть определено по правилу левой руки. Очевидно, что число оборотов ротора никогда не может при этом сделаться равным числу оборотов поля, т. к. тогда не было бы пересечения силовыми линиями проводников роторной обмотки и вращающий момент был бы равен нулю. Такое синхронное вращение могло бы иметь место лишь в том случае, когда ротор при своем вращении не должен был бы преодолевать никаких внешних сопротивлений (трения, сопротивления воздуха) и если бы не существовало потерь на прохождение тока по проводникам. В действительности, даже при холостом ходе, когда полезная нагрузка двигателя равна нулю, эти потери существуют и поэтому скорость ротора даже при холостом ходе будет (хотя и незначительно) меньше скорости вращения поля. По тем же причинам скорость ротора не может быть и выше синхронной (т. е. скорости поля), если только ротор не вращается каким-либо посторонним двигателем, т. к. в этом случае пересечение силовых линий происходило бы в обратном направлении, что, по правилу левой руки, создавало бы не вращающий, а тормозящий момент. Скорость вращения ротора определяется нагрузкой двигателя. Чем больше последняя, тем больший вращающий момент должен быть приложен к ротору, чтобы эту нагрузку преодолеть. В свою очередь величина вращающего момента пропорциональна произведению ФІ2, где Ф - магнитный поток, а I2 — ток ротора. Т. к. при постоянном напряжении сети магнитный поток остается также почти постоянным, то увеличение момента может происходить лишь за счет увеличения роторного тока, величина которого зависит от скорости пересечения проводниками силовых линий поля. Для того, чтобы эта скорость увеличивалась, необходимо, чтобы ротор вращался медленнее. Регулирование скорости вращения и тока в роторе происходит автоматически. Если, например, двигатель разгрузить, то величина вращающего момента станет слишком большой, и ротор начнет ускорять свой ход. При этом, однако, ток в его обмотке начнет уменьшаться, и увеличение скорости будет происходить лишь до тех пор, пока не установится вращающий момент, как раз необходимый для новой нагрузки. До сих пор мы предполагали, что вращающееся поле создается только статорной обмоткой. Такое положение отвечает действительности лишь в том случае, когда обмотка ротора разомкнута и двигатель неподвижен. При работе двигателя в обмотке его ротора протекают токи, которые сами создают (при многофазной обмотке) поле, вращающееся в ту же сторону, что и поле статора. По закону Ленца, эти поля направлены в противоположные стороны и, следовательно, ослабляют друг друга. Геометрическая разность этих полей и будет результирующим полем а. д. Это поле остается почти постоянным по величине, т. к. с увеличением нагрузки, т. е. тока в роторе, одновременно должна возрасти и мощность, поступающая из сети, т. е. ток статора. Другими словами, мы имеем здесь то же явление, что и в обычном трансформаторе.
Скольжение. Несмотря на то, что поля статора и ротора создаются обмотками неподвижной и вращающейся, их можно складывать геометрически, т. к. в пространстве эти поля вращаются с одной и той же скоростью, что становится понятным из следующих рассуждений. Если скорость вращения статорного поля составляет n1 оборотов в минуту и если число оборотов ротора равно n2, то разность n1-n2, отнесенная к числу оборотов статорного поля, называется скольжением. Таким образом, скольжение s=(n1-n2)/n1. Очень часто скольжение выражают в процентах от синхронной скорости n1, и тогда s=(n1-n2)/n1 100%. Число периодов в сети, питающей двигатель, и число оборотов n1 связаны известным нам уравнением f1 = pn1/60. Аналогично, частота токов в роторе f2 = p(n1-n2)/60. Т. к. из выражения для s следует, что n1-n2= sn1, то, подставляя в формулу для f2, получим f2 = pn1s/60 = f1s, т. е. частота тока в роторе равна частоте в статоре, умноженной на скольжение. Таким образом, созданное ротором вращающееся поле будет перемещаться относительно самого ротора со скоростью 60f2/p = 60f1s/p = 60s/p pn1/60 = sn1 = n1-n2 оборотов в минуту. Т. к., кроме того, сам ротор вращается с числом оборотов, равным n2, то скорость вращения роторного поля относительно неподвижного статора будет n1-n2+n2 = n1 т. е. та же, что и статорного поля. Из уравнения для скольжения следует, что при неподвижном двигателе s = (n2-0)/n1 = 1.
Если бы двигатель мог вращаться с синхронной скоростью (n2=n1), то мы имели бы s = (n1-n2)/n1 = 0.
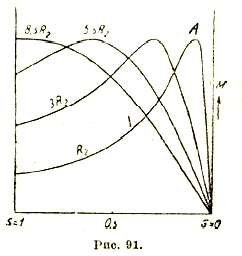
Рис. 91
Вращающий момент. При вращении ротора в его обмотке наводится магнитным потоком эдс, устанавливающая ток. Если скорость ротора близка к синхронной, т. е. двигатель идет вхолостую или нагружен очень слабо, то скольжение будет небольшим, и частота тока в роторе тоже будет невелика. Т. к. индуктивное сопротивление обмотки тем больше, чем больше частота проходящего по ней тока, то при слабых нагрузках индуктивное сопротивление будет весьма мало по сравнению с омическим, и ток будет почти в фазе с вызывающей его эдс. При нагрузке двигателя скольжение увеличивается, частота тока, а с ней и индуктивное сопротивление также растут, и ток начинает отставать от эдс. Вследствие этого не все провода ротора, находящиеся под определенным полюсом, обтекаются током одного направления. При этом часть проводов, взаимодействуя с потоком, по правилу левой руки, создает положительный момент, тогда как другая часть, обтекаемая током противоположного направления, создает отрицательный (тормозящий) момент. В результате общий момент уменьшается. Если при неподвижном двигателе (когда скольжение, а, следовательно, и частота имеют наибольшее значение) омическое сопротивление будет по сравнению с индуктивным очень невелико, то и вращающий момент (называемый при неподвижном двигателе начальным моментом) может оказаться слишком малым. Чтобы его увеличить, нужно увеличить омическое сопротивление ротора, что, однако, вследствие возрастания потерь уменьшит к. п. д. машины. Если ротор имеет трехфазную обмотку, то ее концы можно вывести к кольцам, и тогда мы получим возможность включать на время пуска в цепь ротора добавочное сопротивление в виде реостата и тем повысить начальный момент двигателя. Изменение величины момента от скольжения (т. е. от скорости) показано на рис. 91 (кривая 1). При разворачивании двигателя (уменьшение s) момент вследствие уменьшения индуктивного сопротивления увеличивается, пока не достигнет в точке А максимального значения. При дальнейшем увеличении скорости число перерезываемых силовых линий, а, следовательно, и сила тока настолько уменьшаются, что момент начинает падать и при синхронизме, когда s = 0 (если бы такая скорость была возможна), он делается равным нулю. При увеличении сопротивления ротора максимум момента перемещается в сторону больших скольжений (см. кривые 3 R2, 5,5 R2, на рис. 91). При еще большем увеличении сопротивления (например, для машины, соответствующей чертежу 91 при увеличении сопротивления в 8,5 раз) максимум момента перемещается в точку, соответствующую скольжению s = 1, т. е. начальный и максимальный моменты совпадают. Отметим, что, увеличивая сопротивление ротора, мы лишь перемещаем максимум момента, не изменяя его абсолютной величины. Мощность, передаваемая ротору вращающимся полем W1 = ω1М, где ω1 — угловая скорость вращения поля. Т. к. угловая скорость вращения ротора меньше, чем ω1, то обозначая ее через ω2, мы найдем, что механическая мощность ротора составляет W2 = ω2М. Разность между этими мощностями теряется в роторе и выделяется в виде тепла. Эта разность составляет
Отсюда следует, что электрические потери в роторе пропорциональны скольжению, и поэтому на практике так рассчитывают а. д., чтобы скольжение было наименьшим. Обычно скольжение s составляет при полной нагрузке лишь несколько %%.
Диаграмма а. д. Выше мы указывали, что работа а. д. может быть вполне уподоблена работе трансформатора. Разница заключается лишь в том, что перенос энергии в случае трансформатора совершается неподвижным в пространстве, но пульсирующим во времени потоком, а в случае а. д. поток перемещается в пространстве, но остается неизменным во времени. Т. к. никакого принципиального различия в том, как наводится эдс, в этих обоих случаях нет, то и диаграмма а, д. аналогична диаграмме трансформатора. Здесь мы также будем оперировать с приведенными к первичной цепи величинами, т. е. будем все величины, относящиеся к роторной обмотке, приводить к числу витков обмотки статора. Ток в роторе устанавливается эдс Е2s, индуктированной в обмотке ротора вращающимся полем и равной
![]()
или, так как f2 = sf1, то
![]()
Здесь kw — обмоточный коэффициент и w2 — число витков одной фазы обмотки. Если двигатель неподвижен, то f2 = f1 и в роторе индуктируется эдс, равная Е2 = 4,44 kw w2Ф·10-8. Следовательно, Е2s = sE2. Ток в роторе равен , где xs – индуктивное сопротивление обмотки ротора при скольжении s. Подставляя вместо Е2s величину sE2 и разделив числитель и знаменатель на s, получим
, где xs – индуктивное сопротивление обмотки ротора при скольжении s. Подставляя вместо Е2s величину sE2 и разделив числитель и знаменатель на s, получим  , где х — индуктивное сопротивление неподвижного ротора (при s=1). Если привести все величины к числу витков статора, то приведенный ток
, где х — индуктивное сопротивление неподвижного ротора (при s=1). Если привести все величины к числу витков статора, то приведенный ток 
Таким образом, формально вопрос обстоит так, как если бы в роторе индуктировалась независимо от скорости (скольжения) эдс постоянной величины Е2’ и ток проходил через постоянное индуктивное сопротивление х' и переменное омическое сопротивление r’/s (изменяющееся обратно-пропорционально скольжению). Тогда диаграмма а. д. примет вид, показанный на рис. 92.
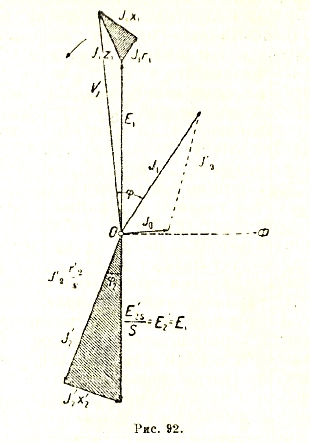
Рис. 92.
Вращающийся поток Ф индуктирует в роторе эдс E’2s/s = E’2 (которая, будучи приведена к числу витков статорной обмотки, очевидно равна эдс Е1 индуктированной тем же потоком в статоре). Ток ротора І’2 отстает от Е'2 на угол φ2. Е'2 расходуется на преодоление индуктивного І’2х’2 и омического I’2 r’2/s сопротивлений. Статорный ток I1 получается, как и для трансформатора, путем геометрического сложения векторов I’2 и I0. Подводимое к статору напряжение сети V1 расходуется на преодоление эдс статора Е1 и падений напряжения индуктивного І’1х’1, и омического І1r1. Вектор V1 опережает ток I1 на угол φ1. Если повернуть нижнюю часть диаграммы так, чтобы векторы Е1 и Е'2 совпали, то получится чертеж, показанный на рис. 93. Здесь, кроме того, вектор KF, изображающий омическое падение напряжения в роторе r’2/s разложен на две составляющих
![]()
Совершенно аналогичную диаграмму будет иметь не только а. д., но и электрическая схема, показанная на рис. 94 и состоящая из последовательно соединенных пяти сопротивлений (двух индуктивных x1 и x'2, двух постоянных омических r1 и r'2 и одного переменного омического r’2 (1-s)/s) и ответвления x0, r0 через которое проходит ток I0 (аналогичный току холостого хода а. д.). Таким образом, с помощью этой схемы (т. н. схемы замещения) могут быть изучены все явления, происходящие в а. д., и законы их изменения.
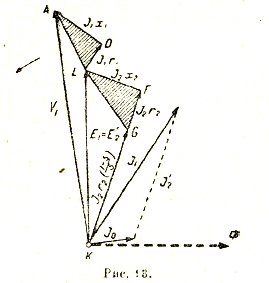
Рис. 93
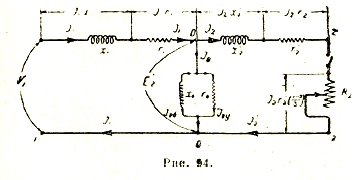
Рис. 94
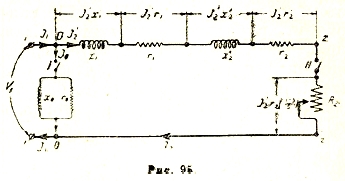
Рис. 95
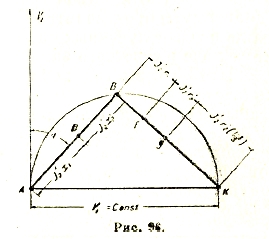
Рис. 96
Для такой схемы, а следовательно и для а. д. (см. теоретические основы электротехники) существует круговая диаграмма, т. е. при изменении нагрузки (сопротивления r’2 (1-s)/s)) конец вектора тока перемещается по окружности. Можно без значительного ущерба для точности упростить схему рис. 121. если перенести ветвь 0—0 (т. н. ветвь холостого хода) на зажимы сети. При этом мы пренебрегаем падением напряжения в сопротивлениях x1 и r1 (т. е. в обмотке статора), которое, вообще говоря, весьма невелико. Эта упрощенная схема показана на рис. 95, и для нее круговая диаграмма строится очень просто. Если сперва считать, что рубильник разомкнут, то круговая диаграмма получит вид, показанный на рис. 96. Здесь отрезок АВ, равный І’2 (x1 + x’2), пропорционален току ротора и в некотором масштабе может быть ему приравнен. При увеличении нагрузки, т. е. увеличении s отрезок![]() уменьшается, и точка В перемещается по окружности вправо. При s = 1 (двигатель неподвижен) GK = 0 и ток приходит в точку Вu (рис. 97). Это — максимальное значение тока в роторе, называемое током короткого замыкания. На диаграмме рис. 95 этот режим характеризуется замыванием накоротко переменного сопротивления r’2 (1-s)/s. При холостом ходе (s ≈ 0) отрезок GK становится бесконечно большим по сравнению с другими падениями напряжения, и ток в роторе становится равным нулю (приходит в точку А, рис. 97). Этот режим получается при размыкании рубильника II на рис. 95. Ток статора определяется уравнением
уменьшается, и точка В перемещается по окружности вправо. При s = 1 (двигатель неподвижен) GK = 0 и ток приходит в точку Вu (рис. 97). Это — максимальное значение тока в роторе, называемое током короткого замыкания. На диаграмме рис. 95 этот режим характеризуется замыванием накоротко переменного сопротивления r’2 (1-s)/s. При холостом ходе (s ≈ 0) отрезок GK становится бесконечно большим по сравнению с другими падениями напряжения, и ток в роторе становится равным нулю (приходит в точку А, рис. 97). Этот режим получается при размыкании рубильника II на рис. 95. Ток статора определяется уравнением![]() и при холостом ходе равен I0 (рубильник II разомкнут, рубильник I замкнут). Если пристроить на диаграмме вектор І0 (по величине и по фазе) так, чтобы его конец попал в точку А (рис. 98), то для какого-либо значения роторного тока АВ статорный ток будет изображаться вектором ОВ. Самое построение диаграммы производится с помощью данных, полученных из опытов холостого хода и короткого замыкания. При опыте холостого хода двигатель заставляют вращаться ненагруженным и определяют ток холостого хода І0 и его фазу, т. е. cos φ. При опыте короткого замыкания определяют соответственно Ік и cos φк . Затем от произвольно выбранной точки О (рис. 99) откладывают по величине и по фазе токи I0 и IК, соединяют их концы линией СЕ и из середины этой линии (точка М) проводят перпендикуляр MN до пересечения с линией CD, параллельной ОВ и проходящей через конец С вектора І0. Далее, на линии ЕF (перпендикулярной к CD) отыскивают точку G, так, чтобы EG/GF = r’2/r1, и проводят линию CG. Построив круговую диаграмму, можно для любого тока двигателя определить все величины, характеризующие его работу при этом токе. Например, для произвольного тока Оа:
и при холостом ходе равен I0 (рубильник II разомкнут, рубильник I замкнут). Если пристроить на диаграмме вектор І0 (по величине и по фазе) так, чтобы его конец попал в точку А (рис. 98), то для какого-либо значения роторного тока АВ статорный ток будет изображаться вектором ОВ. Самое построение диаграммы производится с помощью данных, полученных из опытов холостого хода и короткого замыкания. При опыте холостого хода двигатель заставляют вращаться ненагруженным и определяют ток холостого хода І0 и его фазу, т. е. cos φ. При опыте короткого замыкания определяют соответственно Ік и cos φк . Затем от произвольно выбранной точки О (рис. 99) откладывают по величине и по фазе токи I0 и IК, соединяют их концы линией СЕ и из середины этой линии (точка М) проводят перпендикуляр MN до пересечения с линией CD, параллельной ОВ и проходящей через конец С вектора І0. Далее, на линии ЕF (перпендикулярной к CD) отыскивают точку G, так, чтобы EG/GF = r’2/r1, и проводят линию CG. Построив круговую диаграмму, можно для любого тока двигателя определить все величины, характеризующие его работу при этом токе. Например, для произвольного тока Оа:
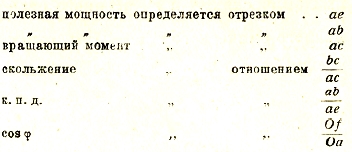
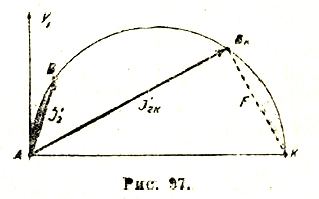
Рис. 97
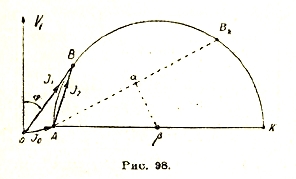
Рис. 98
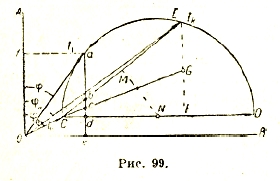
Рис. 99
Если определить эти величины для нескольких значений I1 и построить кривые их изменения в зависимости от полезной мощности двигателя (т. н. рабочие кривые), то получится весьма наглядная картина работы двигателя при различных нагрузках. На рис. 100 показаны, например, рабочие кривые а. д. на 115 кВт, 3 000 вольт, 980 об./мин.
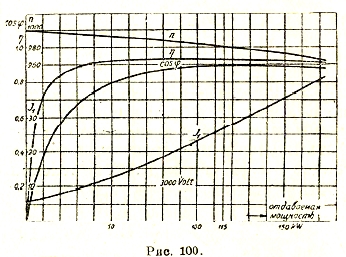
Рис. 100
Пуск в ход и регулирование скорости. Если неподвижный еще двигатель присоединить к полному напряжению сети, то в его обмотку бросится большой ток (в 8—10 раз больший нормального), могущий сжечь обмотку и испортить машину. Кроме того, если мощность двигателя велика, толчок тока вызовет колебания напряжения сети. Поэтому пускать непосредственно от полного напряжения сети можно лишь небольшие машины мощностью до 5 л. с. Обмотка роторов этих двигателей выполняется короткозамкнутой в виде беличьего колеса и рассчитывается так, чтобы пусковой ток не превосходил нормальный больше, чем в 4—5 раз. Для пуска двигателей большой мощности приходится применять особые пусковые приспособления, действие которых основано либо на понижении напряжения сети, либо на временном увеличении сопротивления ротора. В первом случае пользуются или сопротивлениями, или трансформатором. Пуск с помощью сопротивления показан на верхнем чертеже рис. 101. В начале пуска ползушки устанавливаются в крайнее правое положение, и тогда напряжение уменьшается на величину IR, где I — ток, поступающий из сети, а R — сопротивление реостата. По мере разворачивания сопротивление постепенно уменьшают и по достижении полного числа оборотов ползушку ставят в крайнее левое положение, т. е. выключают все сопротивление. Неэкономичность этого способа (большой расход мощности в сопротивлении) привела к применению регулирующегося трансформатора (или автотрансформатора), т. к. собственное потребление трансформатора весьма не велико (верхний чертеж рис. 101).
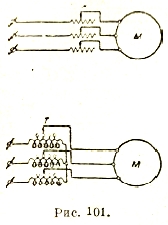
Рис. 101
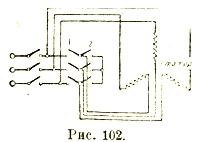
Рис. 102
Если наружу выведены все 6 концов статорной обмотки и нормально работа двигателя происходит при соединении треугольником, то можно добиться уменьшения пускового тока приблизительно в 3 раза путем пуска при соединении в звезду и последующего переключения на треугольник. Схема такого переключателя показана на рис. 102. Описанные способы понижения напряжения применяются лишь для тех двигателей, у которых роторная обмотка соединена накоротко внутри машины, т. е. главным образом для двигателей с ротором в виде беличьего колеса. Для этих же двигателей предложен ряд конструкций (двигатели Бушеро, двигатели с глубокими впадинами и др.), в которых пуск в ход совершается без понижения напряжения, путем особого устройства обмоток. Если роторная обмотка имеет выведенные наружу концы, присоединенные к кольцам, то пуск двигателей, осуществляется с помощью включения сопротивлений в цепь ротора (рис. 103). Здесь в момент включения ползушки устанавливаются в крайнее левое положение и по мере разворачивания постепенно передвигаются вправо, пока, по достижении полной скорости, все сопротивление окажется выключенным, и обмотка ротора замкнутой накоротко. Этот способ имеет еще то преимущество, что при нем повышается начальный момент (см. выше), тогда как при понижении напряжения он резко уменьшается. А. д. принадлежит к числу машин, число оборотов которых мало зависит от нагрузки. Если все же регулирование скорости необходимо, то его можно осуществить введением сопротивлений в цепь ротора, т. к. при этом потери, а следовательно и скольжение должны увеличиться. Этот способ, однако, неэкономичен из-за больших потерь энергии в реостате. Можно путем усложнения схемы (введением, лишних машин) использовать эту «энергию скольжения», как это делается в каскадных соединениях (см. ниже). Наконец, регулировку скорости можно осуществить, применяя особо сконструированную обмотку статора, могущую переключаться на различное число полюсов. Этот способ хотя и экономичен, но не является во многих случаях целесообразным, т. к. не дает плавного изменения скорости.
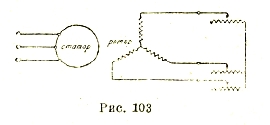
Рис. 103
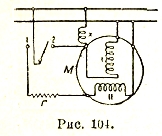
Рис. 104
Однофазный а. д. При питании однофазной обмотки однофазным током возникает пульсирующее поле, взаимодействие которого с проводниками неподвижного ротора не дает определенно направленного вращающего момента Иначе обстоит дело, если ротор однофазного а. д. предварительно развернуть каким-либо образом до скорости, близкой к синхронной. Как указывалось выше, всякое пульсирующее поле можно разложить на два. вращающихся в разные стороны поля половинной величины. Поэтому если ротор приведен во вращение, то на него будет действовать постоянный вращающий момент от поля, вращающегося в ту же сторону. Обратное поле будет стремиться затормозить ротор, но т. к. пересечение проводников с этим обратным полем происходит весьма быстро (скольжение по отношению к этому полю при нормальной скорости составляет около 200 %), то индуктивное сопротивление здесь сильно возрастает и. индуктированные этим полем токи будут сдвинуты по фазе от эдс почти на 90°, что вызовет сильное уменьшение тормозящего момента (при полной скорости он почти равен нулю). Т. к. мдс статора должна создавать оба поля, то потребление намагничивающего (реактивного) тока здесь значительно больше, чем у трехфазного двигателя той же мощности, что приводит к более низкому коэффициенту мощности (cos φ). Так как однофазный двигатель не развивает начального момента, то для пуска его в ход приходится применять особые приспособления, одно из которых показано на рис. 104.
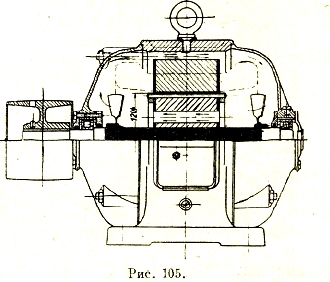
Рис. 105
Здесь на статоре, кроме главной обмотки (I) уложена еще вторая — пусковая (II). При пуске последовательно с главной обмоткой включается индуктивное сопротивление (х), а последовательно с пусковой — омическое сопротивление (r). При установке переключателя в положение 1 обе обмотки включены параллельно, и токи в них благодаря наличию сопротивлений x и r сдвигаются по фазе, а т. к., кроме того, самые обмотки сдвинуты в пространстве, то образуется вращающееся поле, приводящее ротор во вращение. При достижении нормальной скорости переключатель ставится в положение 2, причем сопротивление х и пусковая обмотка (вместе с сопротивлением r) оказываются отключенными от сети, и машина начинает работать как нормальный однофазный двигатель.
Асинхронный генератор. Если присоединенный к сети а. д. заставить с помощью какого-либо постороннего двигателя вращаться со скоростью выше синхронной, то фаза эдс, а следовательно и тока, изменит свое направление на обратное, и машина начнет отдавать энергию в сеть, т. е. превратится в генератор. Несмотря на простоту устройства и эксплуатации, асинхронные генераторы получили пока лишь ограниченное применение, т. к. для возможности работы они должны возбуждаться от сети, к которой они присоединены, т. е. сеть должна питаться еще другими синхронными генераторами. Другими словами, асинхронный генератор не обладает свойством самовозбуждения.
Конструкция а. д. с короткозамкнутым ротором мощностью 0,9 кВт, 2 925 об./мин. На рис. 106 внизу слева лежит ротор с обмоткой в виде беличьего колеса и двумя вентиляторами для охлаждения машины. Середину чертежа занимает статор и два боковых (подшипниковых) щита. По бокам лежат детали шарикоподшипников. На рис. 107 показан разрез, а на рис. 108 — внешний вид двигателя с кольцами мощностью 4,8 кВт, 1 440 об./мин. Справа видны три кольца, к которым присоединена обмотка ротора и которые служат для присоединения реостата. Оба двигателя рассчитаны на напряжение 380 вольт. На рис. 109 показан мощный двигатель для прокатного стана. Его данные: мощность 1 250 кВт, n ≈ 600 об /мин.
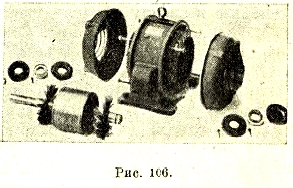
Рис. 106
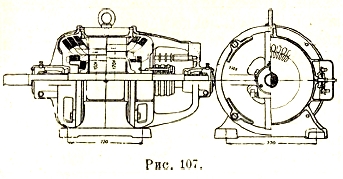
Рис. 107
Рис. 108
Рис. 109.
Синхронные машины (с. м.). Реакция якоря. До тех пор, пока с. м. работает без нагрузки, по обмотке ее якоря (статора) ток либо не проходит совсем (в случае генератора), либо (в случае двигателя) он имеет весьма малую величину по сравнению с током нормальной нагрузки, и его влиянием можно пренебрегать. Такое состояние называется холостым ходом машины.
Т. о. , при холостом ходе с. м. магнитный поток, индуктирующий эдс статора, создается исключительно мдс ротора. При нагрузке, благодаря прохождению тока через проводники статорной обмотки, последняя в свою очередь создает магнитное поле, которое, в случае трех фазной машины, вращается в пространстве с синхронной скоростью, т. е. с той же скоростью, с которой вращается и ротор. В случае однофазной машины пульсирующее поле статора можно разложить на два вращающихся в разные стороны, причем можно учитывать только влияние прямого поля, т. к. инверсное почти целиком уничтожается. Поля ротора и статора, складываясь геометрически, дают некоторое результирующее поле при нагрузке, которая и индуктирует действительную эдс машины. При учете действия реакции якоря необходимо рассматривать отдельно машины с выступающими полюсами и машины с неясно выраженными полюсами, т. к. магнитные сопротивления воздушного промежутка будут в этих случаях различны. Рассмотрим сперва машину с выступающими полюсами. Допустим сперва, что эдс, индуктируемая в обмотке статора роторным (основным) полем, и ток статора совпадают по фазе (внутренний сдвиг фаз равен нулю). Тогда максимум тока в какой-либо катушке статора будет иметь место в тот момент, когда поток, сцепленный с этой катушкой, равен нулю (т. к. эдс отстает от потока на 90°), т. е. амплитуда синусоиды мдс статора будет расположена над серединой катушки или междуполюсного пространства (рис. 110). Из чертежа легко видеть, что при этом поток статора под одной половиной полюса будет складываться с основным потоком машины, а под другой половиной полюса — вычитаться. Здесь, следовательно, получается то же перекашивание поля, которое имело место и при поперечной реакции якоря в машинах постоянного тока. Т. к. мдс статора, действующие на обе половины полюса, равны, то вследствие насыщения железа увеличение потоков в одной половине будет меньше, чем уменьшение в другой половине, и результирующий поток будет несколько меньше, чем поток при холостом ходе. Рассмотрим теперь случай, когда ток в статоре отстает от эдс основного поля на 90°. Легко понять, что здесь волна мдс будет по сравнению с предыдущим чертежей сдвинута на 90° в сторону отставания и, как видно из рис. 111, поле статора будет размагничивать машину, т. е. уменьшать поток холостого хода (силовые линии поля якоря направлены противоположно линиям основного поля). Здесь получается явление, аналогичное продольной реакции якоря машин постоянного тока. При опережении током статора эдс от основного поля на 90° волна мдс статора по сравнению с рис. 110 сдвигается на 90° в сторону опережения (рис. 112), и поле статора будет усиливать основное поле машины. Найденные соотношения справедливы для генераторов. Для двигателей они будут обратными, т. е. при отставании тока будет иметь место усиление основного поля, а при опережении — ослабление. В этом легко убедиться, если на рис. 111 и 112 изменить направления токов в статоре на обратные. В промежуточных случаях, т. е. при сдвигах между током и эдс > 0, но <90°, волна мдс статора будет занимать промежуточное между рис. 110 и 111 положение. Однако, ее можно всегда разложить на две составляющих, у одной из которых амплитуда расположена под серединой междуполюсного пространства (поперечная мдс), а у другой — под серединой полюса (продольная мдс). Так как у машин с выступающими полюсами магнитные сопротивления для поперечного и продольного полей различны (первое обусловлено почти исключительно междуполюсным промежутком и не зависит от насыщения, а второе, заключающееся в железе, сильно зависит от насыщения), то учет действия реакции статора в этих машинах производится отдельно, для поперечного и продольного полей (см. ниже). В машинах с неясно выраженными полюсами распределение мдс остается, разумеется, тем же, но, т. к. благодаря одинаковости воздушного промежутка магнитное сопротивление для обоих потоков одинаково, то при учете действия реакции якоря, уже нет смысла делить потоки на продольные и поперечные и можно оперировать с суммарным полем статора.
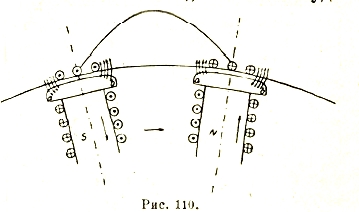
Рис. 110
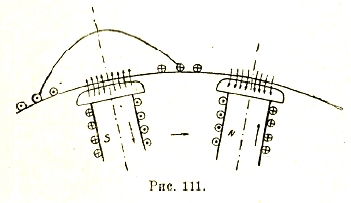
Рис. 111
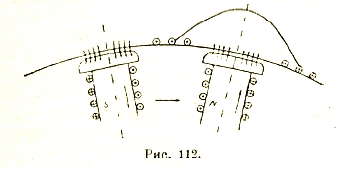
Рис. 112
Диаграммы. Если бы в работающей с. м. отсутствовала реакция якоря и не имели бы место омическое и индуктивное (от рассеяния) падения напряжения, то напряжение на зажимах было бы равно эдс машины. На практике такой случай имеет место лишь при холостом ходе. При нагрузке появляются оба падения напряжения, и, кроме того, результирующий поток будет здесь отличаться на величину потока реакции якоря от поля холостого хода. Влияние реакции якоря можно учесть еще и иначе, а именно предположив, что поле реакции якоря как бы самостоятельно наводит в статорной обмотке эдс самоиндукции, которая вычитается геометрически из эдс холостого хода, в результате чего остается действительная эдс машины при нагрузке. Весьма наглядной является при этом графическая интерпретация всех описанных явлений с помощью диаграмм.
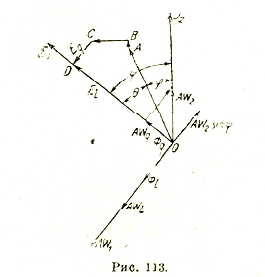
Рис. 113
а) Диаграмма машины с выступающими полюсами. На рис. 113 по вертикали отложен вектор статорного тока I2. В фазе с I2находятся ампер-витки реакции статора AW2, которые мы раскладываем на поперечные ампер-витки AWq = AW2 cos ψ и продольные АW2 sin ψ. Здесь ψ — угол между током I2 и эдс Е1, создаваемой потоком холостого хода Ф, в свою очередь вызываемым ампер-витками ротора AW1. Продольные ампер-витки создают поток, индуктирующий в статоре «продольную эдс», отстающую от AW2 sin ψ на 90° и численно равную отрезку Е1D. Вычитая из E1 отрезок Е1D, мы получаем эдс Ее = OD. Поперечные ампер-витки индуктируют «поперечную эдс», отстающую на 90° от AW2 и равную Eq=DC. Вычитая из Ее эдс Eq мы получим отрезок ОС, равный действительной эдс машины Е. Напряжение на зажимах ОА отличается от Е на величину индуктивного падения напряжения СВ (под углом 90° к току) и омического падения напряжения АВ (в фазе с током). Угол ψ между Е1 и І2 называется углом внутреннего сдвига фаз, а угол φ между АВ и І2 — углом внешнего сдвига фаз. Как видно из чертежа, диаграмма построена для некоторой индуктивной нагрузки. Описанная диаграмма в литературе носит название диаграммы Блонделя—Арнольда—Лякура или сокращенно ВАС (Blondel—Arnold—la Cour).
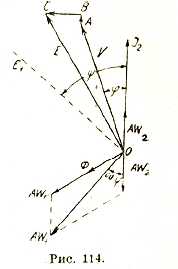
Рис. 114
b) Диаграмма для машины, с неясно выраженными полюсами (диаграмма Потье) показана на рис. 114. Здесь снова по вертикали отложен ток I2 и в фазе с ним ампер-витки реакции якоря AW2. В этом случае уже нет необходимости рассматривать отдельно продольные и поперечные поля реакции якоря. Результирующие ампер - витки AW2, создающие действительный поток машины Ф, индуктирующий действительную эдс Е = ОС, получаются путем геометрического вычитания AW2 (или сложения — AW2) из основных ампер-витков AW1. Вычитая из Е индуктивное (СВ) и омическое (АВ) падения напряжения, получим напряжение на зажимах V. Е1 указывает направление эдс, индуктированной при холостом ходе мдс AW1. Ввиду того, что для построения диаграммы ВАС требуется знание угла ψ и определение его сопряжено с необходимостью добавочных вычислений и построений, часто диаграммой Потье пользуются и для машин с выступающими полюсами. Получающаяся при этом ошибка заметна при коэффициентах мощности, близких к 1, но, уже начиная с cos φ = 0,8 и меньше, результаты получаются достаточно близкими к действительности. Для быстрых подсчетов и для выявления основных процессов, происходящих в синхронных машинах, можно еще больше упростить диаграмму, как было сделано Бен-Эшенбургом. В диаграмме BE машина предположена ненасыщенной, и тогда действие реакции якоря можно заменить некоторым фиктивным индуктивным падением напряжения Іх, вектор которого перпендикулярен к вектору тока. Следовательно, диаграмма BE строится в предположении, что в машине имеется лишь индуктивное падение напряжения Ixs + Іх = (xs + х) = Ixa и омическое падение напряжения Irа. Сопротивление ха, включающее в себя как xs (от рассеяния), так и х (от реакции якоря), называется полным синхронным реактивным сопротивлением. Кроме того, в большинстве практических случаев омическим падением напряжения Irа, по сравнению с Іха, можно пренебречь, и тогда диаграмма приобретает весьма простой вид, показанный на рис. 115.
Рис. 115
Короткое замыкание с. м. Если у вращающейся, но невозбужденной с. м. замкнуть внешние зажимы накоротко (с помощью амперметра) и начать постепенно повышать возбуждение, то можно построить характеристику короткого замыкания, т. е. зависимость между током машины и ампер-витками или током возбуждения. Короткое замыкание с. м. соответствует нагрузке чисто индуктивным сопротивлением, т. к. омическое сопротивление обмотки статора мало по сравнению с индуктивным. Величина тока короткого замыкания I2k ≈ E1/xa. Внешнее напряжение равно при этом нулю. Т. к. при коротком замыкании основной поток очень мал (чтобы установить в сопротивлении ха эдс Е1 требуется небольшая мдс, то при этом режиме железо машины далеко от насыщения, и поэтому характеристика короткого замыкания представляет собой прямую линию. На рис. 116 показаны характеристики холостого хода и короткого замыкания с. м. Если для какого-либо тока I2k = I2 найти ампер-витки возбуждения On и, кроме того, определить по характеристике холостого хода ампер-витки возбуждения Оm, необходимые для создания падения напряжения от рассеяния I2k xs = ml, то получается характеристичный треугольник (треугольник Потье) Oln, у которого высота Іm = I2k xs, основание On = полному числу ампер-витков, необходимых для установления тока короткого замыкания I2k = I2, отрезок Оm — ампер-витки, потребные для покрытия индуктивного падения напряжения I2k xs, и отрезок mn — ампер-витки для компенсации реакции якоря I2k x. Треугольником Потье очень удобно пользоваться на практике для построения внешней характеристики, т. е. зависимости напряжения от нагрузки. На том же чертеже показано влияние насыщения машины на форму характеристики холостого хода. Если ОQ изображает нормальное напряжение машины, то число ампер-витков возбуждения должно быть равно OL = Qb. Из них часть Qa расходуется на воздушный промежуток, а часть аb — на железо. Совершенно иной характер будет иметь короткое замыкание машины, если его произвести внезапно при полном возбуждении. При этом возникает значительный толчок тока (по нормам этот толчок допускается до 15-кратной амплитуды нормального тока), и появляются значительные механические силы, которые при недостаточно прочной конструкции могут вывести машину из строя.
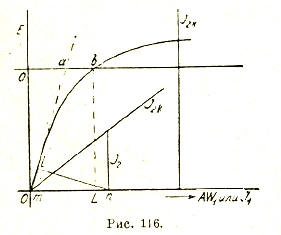
Рис. 116
Параллельная работа с. м. Для возможности параллельной работы с. м. на общую сеть должны быть при включении выполнены следующие условия: равенство напряжений присоединяемой машины и уже работающих, одинаковость фаз напряжений и равенство частот. Последнее условие приводит к требованию, чтобы числа оборотов обеих машин были равны, если числа полюсов одинаковы, или находились бы в обратном отношении к числам полюсов. На рис. 117 однофазная машина I работает на некоторую внешнюю сеть 1, 2. Пусть напряжение на зажимах этой машины будет V1. Пусть, I далее машина II приведена во вращение с такой скоростью, что частота и фаза напряжения ее те же, что и у машины I, но напряжение ее V2 несколько меньше, чем V1. Кроме того, здесь, как и в машинах постоянного тока, напряжения обоих генераторов должны быть направлены в противоположные стороны, т. е. как показано на рис. 117 стрелками.
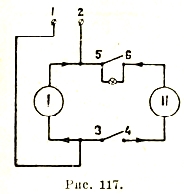
Рис. 117
Если теперь замкнуть рубильник 3, 4, то между точками 5, 6 будет иметь место разность напряжений v = V1-V2, которую можно обнаружить, если к точкам 5 и 6 присоединить лампу или вольтметр. При замыкании рубильника 5, 6 напряжение v установит в цепи обоих генераторов (если пренебречь их омическими сопротивлениями) ток i=v(xa1+xa2). Будучи чисто реактивным, этот ток отстает от вызывающего его напряжения v на 90° (рис. 118).

Рис. 118
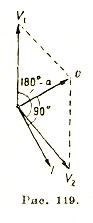
Рис. 119
Рис. 120
Из чертежа видно, что ток і для машины I будет отстающим, а для машины II опережающим, благодаря чему вызванная им реакция якоря несколько размагнитит генератор I и подмагнитит генератор II. В результате на зажимах внешней цепи, т. е. между точками 1, 2, установится некоторое среднее напряжение V, причем V1 > V > V2. При достаточно большой разнице между V1 и V2 ток i может достигнуть значения, опасного для целости машин и измерительных приборов. Отсюда следует, что включать на параллельную работу машины с разными напряжениями недопустимо. Если напряжения и частоты обоих генераторов одинаковы, но фазы их различны, т. е. векторы напряжений сдвинуты на угол 180°—α < 180°, то при включении получится диаграмма, показанная на рис. 119. Замыкая рубильник 3, 4 (рис. 117), мы получим между токами напряжение v, равное геометрической сумме V1 и V2. В этом случае при замыкании рубильника 5, 6 уравнительный ток і, сдвинутый на 90° от v, оказывается почти в фазе с V2 и, следовательно, будучи для него током нагрузки, этот ток заставит ротор генератора II несколько затормозиться. По отношению к напряжению V, генератора I этот ток сдвинут почти на 180° и, следовательно, будучи током двигательным, несколько подгонит его ротор. По истечении некоторого промежутка времени ток і выравняет положение обоих роторов, и оба они начнут вращаться синхронно и притом так, что угол между V1 и V2 станет равен 180°. Однако, включать генераторы на параллельную работу при неодинаковости фаз напряжений нельзя, так как возникающие при этом механические усилия могут вызвать порчу генераторов и их первичных двигателей. Если напряжения генераторов равны, но частоты их различны, то при замыкании рубильника 3, 4 лампа или вольтметр, помещенные между зажимами 5, 6, будут испытывать непрерывные колебания напряжения. На рис. 120 построены синусоиды напряжений обоих генераторов с отличающейся друг от друга частотой. Очевидно, что в точках 1 и 3 результирующее напряжение v = 0. а в точке 2 оно вдвое больше напряжения каждого генератора. Если частоты обоих генераторов отличаются лишь незначительно, то период затухания и вспыхивания лампы будет большим, и легко уловить момент, когда v=0. Если в этот момент включить рубильник 5, 6, то никакого выравнивающего тока не появится, и в дальнейшем генераторы пойдут синхронно. Т. о. лампа или вольтметр могут служить указателями правильного момента включения. После правильного включения присоединенная машина находится в состоянии электрического равновесия, т. е. она не отдает и не потребляет тока. Для того, чтобы нагрузить машину, недостаточно повысить ее возбуждение, т. к. повышение напряжения поведет лишь, как было выяснено выше, к появлению реактивного тока, но не создаст активного тока, могущего совершать работу. Единственным средством нагрузить машины является увеличение вращающего момента ее первичного двигателя, т. к. при этом ротор получит стремление забежать вперед, а это, как мы видим (рис. 119), сейчас же вызовет появление активного тока нагрузки. Все изложенное справедливо и для трехфазных машин, но подготовка машины к включению, т. н. синхронизация, обставлена здесь несколько иначе.
Рис. 121.
На рис. 121 машина I работает на некоторую сеть. Для синхронизации машины II можно воспользоваться тремя лампами, включенными между зажимами отдельных фаз. Здесь все лампы загораются и потухают одновременно (если этого нет, то фазы машины присоединены неправильно), и включение происходит, как и для однофазной машины, в тот момент, когда все лампы потухнут. Более распространенным является другой способ присоединения ламп, показанный у генератора III, когда одна лампа присоединена обоими полюсами к одной и той же фазе, а две другие — к различным. Очевидно, что включение должно происходить здесь в тот момент, когда первая лампа потухнет, а две другие будут гореть полным накалом. Этот способ имеет то преимущество, что по порядку потухания ламп можно судить о слишком быстром или слишком медленном вращении синхронизируемой машины. Выше мы указывали, что для нагрузки параллельно работающего генератора необходимо увеличить вращающий момент в его первичном двигателе, т. к. при этом между напряжениями машин, а также между их роторами, возникает расхождение на некоторый угол, вызывающее появление активных токов в статорах машин. В результате появляется сила, стремящаяся выровнять положение роторов, т. е. привести векторы напряжений снова к углу в 180°. Эту силу называют синхронизирующей. Действие ее оказывается, однако, в силу механической инерции вращающихся частей, не постепенным, а колебательным. Когда угол между роторами (например, вследствие разгрузки машины) сделается равным нулю, ротор под влиянием инерции несколько перейдет за это значение, и действие синхронизирующей силы сейчас же станет обратным, т. е. ротор снова получит стремление вернуться к нулевому положению, но опять вследствие инерции перейдет за него и т. д. Мы получаем здесь полную аналогию с маятником, качания которого постепенно затухают. Указанные колебания, возникающие при всяком изменении мощности и заставляющие ротор не сразу остановиться в положении, соответствующем данной нагрузке, присущи самой машине и зависят исключительно от ее индивидуальных свойств, благодаря чему их называют собственными колебаниями. Однако, существуют еще вынужденные колебания, вызываемые неравномерностью хода поршневых первичных двигателей. Если периоды собственных и вынужденных колебаний одинаковы, то наступает явление резонанса, при котором появляются столь значительные увеличения амплитуды качания, что параллельная работа машин становится невозможной. Выше мы видели, что, изменяя только возбуждение машины, мы не можем воздействовать на степень ее загрузки, т. е. не можем вызвать в её статоре активный ток. В якоре появляется лишь реактивный ток, отстающий (при перевозбуждении генератора) или опережающий (при недовозбуждении). Т. к. мощность, отдаваемая генератором, при этом не изменяется, то общий ток растет лишь за счет реактивной составляющей. Если откладывать по оси абсцисс токи возбуждения или соответствующие им эдс Е1, а по оси ординат — токи статора, то связь между ними выразится в виде кривой, имеющей форму буквыV, — т. н. V-образной кривой, или кривой Мордея. Чем меньше полное синхронное реактивное сопротивление ха, тем острее кривая, т. е., тем резче происходит изменение тока в статоре при изменении возбуждения. На рис. 122 показаны V-образные кривые для трех машин, у которых ха относятся как ¼ : ½ : 1. Машины с очень острыми кривыми меньше подходят для параллельной работы, и поэтому значение ха не должно быть меньше известных пределов. С точки зрения использования машины ее следует возбуждать так, чтобы ток в статоре был наименьшим. Это имеет место в нижней части кривой, когда весь ток является активным и cos φ = l.
Рис. 122.
Синхронный двигатель. Если уменьшать вращающий момент первичного двигателя, приводящего во вращение параллельно работающий генератор, то ротор будет стремиться отстать на некоторый угол. Благодаря этому между напряжениями появится такой сдвиг фаз, что вызванный разностью напряжений ток будет стремиться поддержать вращение машины, т. е. будет направлен по отношению к эдс отстающего генератора на угол больший 90°. Этот ток доставляется сетью, и прохождение его не прекращается и после полной остановки первичного двигателя, вращающего данную машину. Т. о. наша машина превращается в электродвигатель. При механической нагрузке его расхождение векторов напряжения сети и эдс машины увеличивается еще больше и вместе с тем увеличивается и поступление тока (и мощности) из сети. Диаграмма синхронного двигателя показана на рис. 123. Вектор напряжения сети V1 направлен по вертикали. Эдс двигателя Е1 является замыкающей стороной векторов напряжения V, (равного и противоположного V1) и падения напряжения U=I1xa. Перпендикулярно к вектору U1 расположен вектор тока I1. Если, не изменяя нагрузки, регулировать возбуждение двигателя, то будет изменяться лишь реактивная составляющая тока. Можно доказать, что при этом конец вектора эдс может перемещаться лишь по прямой, параллельной V1. Например, при некотором недовозбуждении вектор эдс займет положение Е3, вектор I3ха — положение U3 и ток — положение І3, т. е. будет отстающим. При перевозбуждении (векторы Е1, U1) ток будет опережающим.
Рис. 123
Наконец, можно найти такое положение (Е2, U2), при котором ток І2 будет целиком активным, т. е. будет совпадать с напряжением сети. Изменение тока I и здесь происходит по 7-образной кривой, но в отличие от генератора ток будет отстающим при недовозбуждении и опережающим при перевозбуждении. Возможность работать всегда при cos φ = 1 составляет большое практическое достоинство синхронных двигателей. Недостатком этих машин является то, что их пуск в ход связан с некоторыми затруднениями. Чтобы пустить синхронный двигатель, его нужно сперва синхронизировать с сетью. Для этой цели можно применить специальный пусковой мотор, например асинхронный, или воспользоваться возбудителем (машиной постоянного тока, сидящей на одном валу с с. м. и служащей для питания ее роторной обмотки постоянным током). Последний способ применим, впрочем, лишь тогда, когда имеется источник постоянного тока, например аккумуляторная батарея. Современные синхронные двигатели пускаются обычно как асинхронные. Для этой цели на роторе устраивают из медных стержней и лобовых колец обмотку в виде беличьего колеса. Если теперь подвести к статору переменное напряжение (для уменьшения пускового тока пониженное с помощью автотрансформатора), то вращающееся поле статора приведет ротор во вращение. Обмотку постоянного тока при этом замыкают накоротко, чтобы в ней не индуктировались опасные для ее целости высокие напряжения. По достижении скорости, близкой к синхронной, включают постоянный ток в обмотку возбуждения, благодаря чему под влиянием синхронизирующей силы ротор втягивается в синхронизм. После этого напряжение статора увеличивается до нормального, и пуск двигателя закончен.
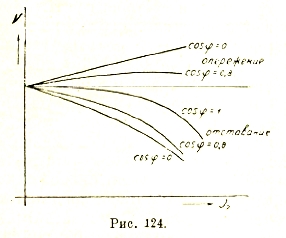
Рис. 124
С. м. как фазокомпенсатор. Выше мы видели, что перевозбужденный синхронный двигатель потребляет опережающий ток. Вследствие этого он ведет себя как конденсатор и может компенсировать действие индуктивности от других потребителей (например, асинхронных двигателей), присоединенных к той же сети. Это свойство проявляется и при холостом ходе синхронного двигателя, когда он не совершает никакой механической работы. Такой двигатель получает обычно облегченную конструкцию и часто называется «синхронным конденсатором». Разумеется, для той же цели может применяться и недовозбужденный генератор.
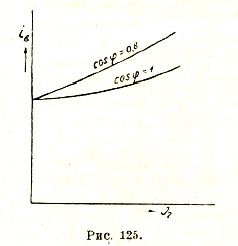
Рис. 125
Характеристики с. м. С двумя основными характеристиками с. м. мы уже познакомились выше. Это — характеристики холостого хода и холостого замыкания. Внешние характеристики синхронного генератора, т. е. зависимости V = f (І2), показаны на рис. 124. При cos φ = 1 напряжение с увеличением тока постепенно уменьшается благодаря падению напряжения и размагничивающему действию реакции якоря. При отстающем токе падение напряжения увеличивается с уменьшением cos φ, т. к. сильно возрастает продольное (размагничивающее) поле реакции якоря. При некоторой емкостной нагрузке (опережающий ток) напряжение сохраняется приблизительно постоянным, т. к. здесь падение напряжения компенсируется дополнительным намагничиванием от реакции якоря. При еще большем опережении характеристика загибается кверху, т. к. влияние падения напряжения здесь уменьшается по сравнению с влиянием реакции. На рис. 125 показаны регулировочные характеристики для отстающего тока при cos φ = 1 и 0, 8, т. е. кривые іb = f(I2). Характер кривых понятен из предыдущего. Для синхронных генераторов весьма важной величиной является процентное изменение напряжения, под которым понимают повышение напряжения при разгрузке от нормального тока до холостого хода при неизменном возбуждении. Эта величина составляет ε=(Е1-V)/V 100% и увеличивается с уменьшением cos φ при отстающем токе. При опережающем токе ε становится отрицательным.
Рис. 126
Конструкции с. м. На рис. 126 показан небольшой синхронный генератор с выступающими полюсами, 40 ква, 230 вольт, 1000 об/мин. Справа виден сидящий на одном валу с генератором возбудитель постоянного тока, питающий обмотку возбуждения. На рис. 127 показан ротор с выступающими полюсами генератора мощностью 40 000 ква, 300 об/мин. На рис. 128 виден монтаж ротора быстроходного генератора с неясно выраженными полюсами (турбогенератора) мощностью 100 000 ква, 1500 об/мин., приводимого во вращение паровой турбиной. На рис. 129 показан гидрогенератор (приводимый во вращение гидравлической турбиной) верти кального так называемого зонтичного типа, мощностью 18 350 ква, 600 об/мин. Наверху расположен возбудитель. Вертикальный вал этой машины пропущен вниз и там соединен непосредственно с турбиной.
Рис. 127
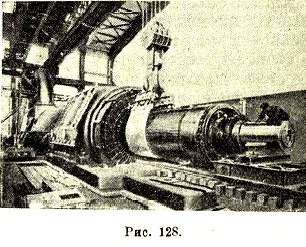
Рис. 128
Вращающиеся преобразователи. Одноякорные преобразователи (о. п.). Если в машине постоянного тока обмотку якоря помимо коллектора присоединить еще к кольцам, то получится устройство, позволяющее преобразовывать переменный ток в постоянный, или наоборот. Обычно о. п. применяется для преобразования переменного тока в постоянный. Для этой цели к кольцам подводится однофазный или многофазный ток, а с коллектора снимается постоянный; т. к. обмотка возбуждения питается здесь постоянным током, то о. п. можно рассматривать как совмещение в одной машине синхронного двигателя и генератора постоянного тока. Число контактных колец определяется числом фаз: для однофазного тока два кольца, для трехфазного — три и т. д. Наиболее часто встречаются шестифазные преобразователи с шестью контактными кольцами. На рис. 130 показаны однофазный (слева) и трехфазный (справа) о. п. Для того чтобы не затемнять чертежа, коллектор показан снаружи обмотки. Ответвления к кольцам расположены на одинаковом друг от друга расстоянии, определяемом числом фаз. Число оборотов о. п. определяется как и для синхронной машины формулой n = 60f/p.
Рис. 129
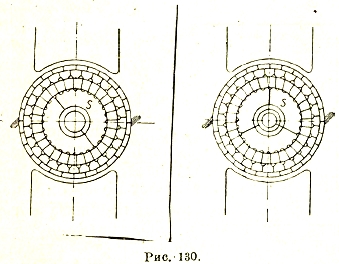
Рис. 130.
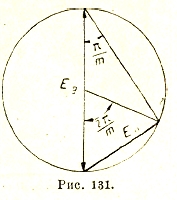
Рис. 131.
При нагрузке якорь стремится затормозиться, что вызывает уравнительный активный ток, идущий из сети. Этот ток, как и у синхронного двигателя, достигает такой величины, чтобы вызванный им момент вращения как раз уравновешивал момент сопротивления;со стороны постоянного тока. Магнитное поле, вызванное переменным током в якоре, вращается относительно последнего с синхронной скоростью, основное же поле (от постоянного тока) неподвижно в пространстве. Для возможности взаимодействия оба поля должны быть неподвижны друг относительно друга, и поэтому необходимо, чтобы якорь о. п. вращался в сторону, обратную направлению вращения его поля с той же синхронной скоростью. Т. к. в о. п. для восприятия переменного тока и отдачи постоянного служит одна и та же якорная обмотка, то, очевидно, напряжения переменного и постоянного тока находятся в определенном соотношении. Если последовательно откладывать напряжения отдельных витков обмотки, то, обойдя всю обмотку, мы получим замкнутый многоугольник с числом сторон, равным числу витков. При большом числе витков многоугольник практически превращается в окружность, диаметр которой равен напряжению на коллекторе. Хорда, соединяющая какие-либо две точки окружности, определяет амплитуду переменного напряжения, действующего между соответствующими токами обмотки. Если обмотка симметрично присоединена к m кольцам, т. е. точки присоединения колец расположены под углом 2π/m (Рис. 131), то амплитуда переменного напряжения, действующего между соседними кольцами Еn, равна хорде, стягивающей дугу 2π/m окружности с диаметром Eg, т. е., как видно из чертежа, En=Eg sin π/m, а эффективное значение при синусоидальной форме напряжения будет
Отметим, что для однофазного о. п. m = 2. Найденная формула справедлива для холостого хода, когда падения напряжения не имеют места, но и при нагрузке отклонения от нее невелики. Т. к. величины напряжения стандартизованы, то нельзя так подобрать Ew и Eg, чтобы они оба одновременно отвечали стандартным значениям. Поэтому непременной принадлежностью о. п. является трансформатор, включаемый между кольцами и сетью переменного тока. Величина постоянного и переменного токов также находится в определенном соотношении, которое мы даем здесь без вывода. Если обозначить постоянный ток через Ig, а линейный-переменный через Iw, то
Отношения Ew/Eg и Iw/Ig (для cos φ = 1) приведены в следующей таблице:
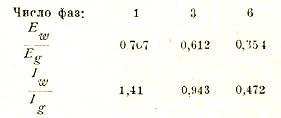
Т. к. эдс якоря индуктируется единственным результирующим магнитным потоком и т. к. переменный ток, являясь двигательным, составляет с эдс угол > 90°, а постоянный ток, будучи генераторным, находится в фазе с эдс, то постоянный и переменный токи протекают в якоре почти в противоположном направлении, и через проводники якоря проходит разность этих токов. Благодаря этому потери в якоре у о. п. меньше, чем, например, у генератора постоянного тока при той же мощности и притом тем меньше, чем больше число фаз. Так, например, шестифазный о. п. при тех же размерах и при cos φ = 1 может отдать мощность почти вдвое (точнее, в 1,93 раза) большую, чем генератор постоянного тока. Чем меньше cos φ, тем меньше и мощность о. п. Соответственно и падение напряжения в о. п. меньше, чем в машине постоянного тока. Подводимый к о. п. переменный ток можно разложить на активную и реактивную составляющие. Активная составляющая создает поперечное поле реакции якоря, направленное против поперечного поля реакции постоянного тока (т. к. эти токи сдвинуты на 180°). Благодаря этой взаимной компенсации поперечное поле якоря о. п. не существует (вернее, остается незначительная разность полей, вследствие различной формы мдс постоянного и переменного тока). Реактивная составляющая создает продольную реакцию, размагничивающую или намагничивающую машину, в зависимости от направления сдвига фаз. Коммутация в о. п. происходит точно так же, как и в машинах постоянного тока. Если о. п. снабжен дополнительными полюсами, то число их ампер-витков может быть значительно меньше, чем в машине постоянного тока, т. к. при отсутствии поперечного поля их задача сводится только к улучшению коммутации. Если желательно регулировать напряжение на стороне постоянного тока, то нельзя воспользоваться изменением возбуждения, т. к. таким путем будет, как и у всякого синхронного двигателя, изменяться лишь реактивная составляющая тока, влияние которой нападение напряжения о. п. слишком мало вследствие небольшой величины реактивного сопротивления. Обычно для возможности регулирования увеличивают реактивное сопротивление путем включения дроссельной катушки между кольцами и сетью или путем увеличения рассеяния трансформатора. Тогда реактивный ток, возникающий при изменении возбуждения, будет обусловливать уменьшение (при недовозбуждении) или увеличение (при перевозбуждении) напряжения на кольцах, а, следовательно, и на коллекторе. Диаграмма регулирования показана на рис. 132. Ток Iw направлен по вертикали. При недовозбуждении напряжение трансформатора Vt и напряжение дроссельной катушки Vd дают напряжение на кольцах Vw < Vt, а при перевозбуждении Vw > Vt. Пуск в ход о. п. совершается либо со стороны постоянного тока в качестве шунтового двигателя (если в распоряжении есть источник постоянного тока), или теми же способами, как и для синхронного двигателя (см. выше).
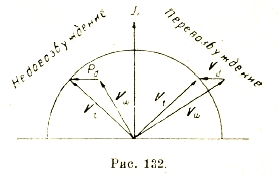
Рис. 132
Мотор-генератор (м.-г.). Для превращения переменного тока в постоянный можно применить агрегат, состоящий из соединенных между собой двигателя переменного тока и генератора постоянного тока, т. н. м-г. Двигатель может быть как синхронным, так и асинхронным. Обычно применяется последний, как дающий большие удобства при пуске в ход. Достоинством м-г. является полная свобода в выборе напряжений отдельных машин, и их независимость друг от друга. Недостаток — меньший по сравнению с о. п. кпд.
Каскадный преобразователь (к. п.). Промежуточное положение между одноякорными преобразователями (о. п.) и мотор-генераторами (м. г.) занимает каскадный преобразователь (к. п.), состоящий из асинхронного двигателя и о. п., механически и электрически связанных друг с другом. Отличительным свойством к. п. является то, что здесь о. п. работает не только как преобразователь, но и частично как генератор постоянного тока. Ввиду ограниченного применения в настоящее время к. п. мы подробно его теорию рассматривать не будем.
Конструкции. На рис. 133 показан шестифазный 1000 кВт, 750 об./мин., 600 вольт на стороне постоянного тока. Слева расположены кольца, справа — коллектор. На рис. 134 показан м-г. на 2000 кВт, 593 об./мин., состоящий из асинхронного двигателя (справа) и генератора постоянного тока. Небольшая машина, расположенная за асинхронным двигателем, представляет собой фазокомпенсатор (см. ниже).
Рис. 133
Рис. 134
Коллекторные машины переменного тока. Коллекторные двигатели (к. д.). а) Однофазный двигатель сериесного возбуждения (о. с.). Если взять обычный двигатель постоянного тока сериесного возбуждения и подвести к его зажимам однофазный переменный ток, то двигатель придет во вращение. Здесь магнитный поток в обмотке возбуждения вызывается тем же током, который проходит и через якорь, а следовательно, направление потока и якорного тока меняются одновременно, что по правилу левой руки приведет к вращающему моменту, направленному всегда в одну и ту же сторону. Т. к. поток здесь пульсирует, то весь магнитопровод для уменьшения потерь должен быть собран из листового железа. На практике, однако, такой двигатель должен подвергнуться некоторым конструктивным изменениям, т. к. большая индуктивность обмоток возбуждения и якоря привела бы к слишком низкому коэффициенту мощности. Поэтому для уменьшения индуктивности обмотки возбуждения ее изготовляют с возможно малым числом витков, а якорный поток, не приносящий никакой пользы, уничтожают с помощью компенсирующей обмотки, обтекаемой тем же током, что и якорь, но в таком направлении, чтобы оба потока были направлены навстречу и друг друга компенсировали. Схема о. с. показана на рис. 135.
Рис. 135
Здесь В — обмотка возбуждения, А — якорь, К — компенсирующая обмотка. При таком устройстве индуктивности якоря и компенсирующей обмотки будут обусловлены только полями рассеяния, т. е. будут сведены к минимальной величине. Что касается коммутации тока, то в о. с. она, совершаясь по тем же законам, что и в машине постоянного тока, несколько осложняется благодаря тому, что короткозамкнутая секция во время коммутации подвергается действию не только собственного поля самоиндукции, вызванного изменением тока, но и действию пульсирующего потока возбуждения, наводящего в ней т. н. трансформаторную эдс (т. к. короткозамкнутая секция и обмотка возбуждения представляют собой трансформатор). Обе эдс, наводимые этими потоками, складываются геометрически и дают результирующее напряжение коммутации е, под влиянием которого появляется добавочный ток і = e/z (здесь z - кажущееся сопротивление цепи короткозамкнутой секции), перегружающий щетки и могущий вызвать искрение на коллекторе. Уменьшить ток і можно либо путем увеличения z, либо путем уменьшения е. В первом случае между коллекторными пластинами и обмоткой якоря включают сопротивления из плохого проводника (железо, никелин и т. д.). Этот метод обладает рядом отрицательных качеств и в настоящее время не применяется. Для уменьшения эдс е прибегают к устройству дополнительных полюсов, создающих в короткозамкнутой секции эдс ек, равную и противоположную е. В о. с. задача устройства дополнительных полюсов осложняется необходимостью компенсировать две эдс, изменяющиеся по совершенно различным законам. Поэтому ни одна из схем полностью не удовлетворяет всем требованиям. Наиболее употребительным и целесообразным является последовательное соединение дополнительных полюсов, показанное на рис. 136.
Рис. 136
Здесь В — обмотка возбуждения, К — компенсирующая, А — якорная и D — дополнительных полюсов, причем параллельно с последней включено регулируемое сопротивление R для того, чтобы сдвинуть ток в обмотке D по сравнению с главным током двигателя. Напряжение сети, приложенное к зажимам двигателя, должно уравновесить: эдс, появляющуюся в роторе под влиянием вращения в магнитном поле статора (противо эдс) Е1 находящуюся в фазе с током; эдс самоиндукции обмотки возбуждения Е2, отстающую от тока на 90°; омическое падение напряжения во всех обмотках Е3, находящееся в фазе с током, и индуктивное падение напряжения от рассеяния в тех же обмотках Е4 отстающее от тока на 90°. Векторная диаграмма для о. с. показана на рис. 137. Т. к. эдс Е1 зависит от скорости вращения, то из диаграммы ясно, что чем быстрее вращается двигатель, тем меньше будет сдвиг фаз между током и напряжением (тем больше cos φ). Отсюда же ясно, что в о. с. коэффициент мощности никогда не может стать равным 1 (хотя при больших скоростях вращения он иногда доходит до 0,95). Пуск в ход о. с. совершается с помощью регулируемого трансформатора, понижающего напряжение сети. С помощью того же трансформатора регулируется и скорость этих двигателей. Главнейшая область применения о. с. — железнодорожная тяга.
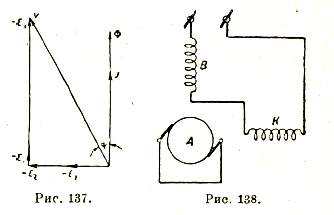
Рис. 137, 138.
b) Однофазный репульсионный двигатель (о. р ). Схема о. р. показана на рис. 138. Здесь имеются две статорных обмотки В и К, соединенные последовательно и включенные на напряжение сети и якорь А, обмотка которого замкнута накоротко. Пульсации потока К вызывают в якорной обмотке ток, который, взаимодействуя с потоком обмотки В, и создает вращающий момент двигателя. Большим преимуществом о. р. является полное отделение статора от ротора, что позволяет присоединять машину непосредственно к сети довольно высокого напряжения. Векторная диаграмма о. р. показана на рис. 139.

Рис. 139
Токи статора І1 и ротора I2 складываясь как в трансформаторе, дают намагничивающий ток Іm, в фазе с которым находится поток Ф2, создаваемый обмоткой К. Поток Ф1 обмотки В находится в фазе с током статора І1. Поток Ф2 наводит в роторе эдс трансформации Е1, сдвинутую от него на 90°, а поток наводит в том же роторе эдс вращения Е2, находящуюся в фазе с Ф1. Эдс Е1 и Е2, складываясь, дают результирующую, идущую на покрытие омического (І2z2) и индуктивного (I2x2) падений напряжения в роторе. Напряжение сети должно уравновесить: эдс Е3, наводимую в статорной обмотке В колебаниями ее собственного потока Ф1 (эдс самоиндукции), эдс Е4, наводимую в обмотке К потоком Ф2, омическое падение напряжения в статоре І1r1 и индуктивное падение напряжения І1x1. Рассмотренный о. р. можно упростить (двигатель Томсона), соединив обе статорных обмотки в одну и расположив ее под некоторым углом α к оси щеток (рис. 140). Получающийся наклонный магнитный поток можно геометрически разложить на два: вертикальный (перпендикулярно к оси щеток) и горизонтальный (по оси щеток). Если устроить приспособление для перемещения щеток по коллектору, то поворотом их оси можно изменять угол α, а, следовательно, и регулировать величины составляющих потоков. При таком сдвиге щеток, когда α = 0° или 90°, двигатель вращаться не будет, т. к. в первом случае Ф1 = 0, а во втором Ф2 = 0. Для пуска двигателя в ход устанавливают щетки под углом α=90°, включают статорную обмотку на сеть и начинают медленно поворачивать щетки. При этом двигатель приходит во вращение, причем величина крутящего момента будет зависеть от соотношения между потоками Ф1 и Ф2, т. е. от угла поворота щеток. Максимальный момент обычно достигается при α≈15°. Следует отметить, что при пусковом положении (α = 90°) короткозамкнутые секции обмотки якоря сцеплены с полным потоком статора, что вызывает значительные внутренние токи. Этим недостатком не обладает показанный на рис. 141 о. р. системы Дери с двумя парами щеток. Здесь одна пара щеток (А, А1) установлена неподвижно, а другая пара (В, В1) может перемещаться с помощью особого приспособления. Щетки соединены между собой попарно (А с В, А1 с B1) гибким кабелем.
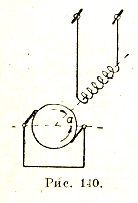
Рис. 140

Рис. 141
Из чертежа видно, что, смещая подвижные щетки на угол 2α, мы перемещаем ось статорной обмотки всего на угол α. Т. к. щетки попарно замкнуты накоротко, то ток проходит лишь по тем участкам обмотки которые лежат между соединенными между собой щетками. При пуске в ход (α=90°) щетки поворачиваются на угол 2α = 180°, и замыкаемые ими катушки не будут совершенно сцеплены с потоком статора. Другими преимуществами двигателя Дери являются более плавное изменение скорости и более благоприятная коммутация тока. Реверсирование, т. е. изменение направления вращения, достигается в о. р. поворотом щеток в обратном, по отношению к пусковому, направлении. Коэффициент мощности этих двигателей довольно высок и приблизительно равен cos φ трехфазных асинхронных двигателей такой же мощности. Главнейшей областью применения о. р. является текстильная промышленность, особенно в прядильных машинах.
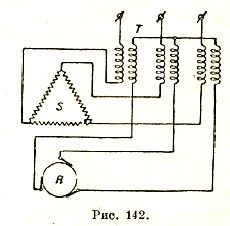
Рис. 142
с) Трехфазный двигатель сериесного возбуждения (т. с.). Схема т. с. показана на рис. 142. Здесь S — соединенный в треугольник статор, выполненный точно так же, как и у нормального асинхронного двигателя, R — ротор, представляющий собой якорь постоянного тока. На якоре расположены три щетки, сдвинутые на угол 120° и присоединенные к вторичным обмоткам т. н. сериес-трансформатора. Благодаря тому, что первичные обмотки трансформатора обтекаются током статора, ток ротора будет ему пропорционален. Благодаря как бы последовательному соединению обмоток статора и ротора, фазы мдс этих обмоток совпадают. Т. к. статор и ротор имеют трехфазную обмотку, то они совместно создают вращающееся магнитное поле, если обмотки включены так, что поля статора и ротора вращаются в одну сторону. Вращающий момент двигателя будет зависеть не только от величины результирующего поля, но и от относительного положения составляющих полей в пространстве, обусловленного положением щеток на коллекторе. Перемещая щетки, можно изменять пространственное положение роторного поля, а, следовательно, и величину вращающего момента. Результирующее магнитное поле, пересекая витки обмотки статора и ротора, наводит в них эдс:
![]() и
и ![]()
где f1 — частота сети, s — скольжение ротора, w1 и w2 — числа витков статорной и роторной обмоток, kw1 и kw2 обмоточные коэффициенты, Ф — результирующий поток. Если предположить, что обе обмотки выполнены одинаково с одинаковым числом витков (если этого нет, то можно оперировать с приведенными величинами), то из этих уравнений получается, что E2/E1 = s. Если щетки сдвинуты на коллекторе на угол α (нормально угол α≈150°), то на такой же угол должны быть сдвинуты и мдс статора и ротора, а следовательно и эдс E1 и Е2. Пренебрегая потерями, можно сказать, что напряжение сети V должно уравновесить эти эдс. Тогда получается диаграмма, показанная на рис. 143.
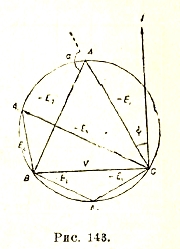
Рис. 143.
Точка А и треугольник равновесия ВАС соответствуют случаю, когда E1=Е2, т. е. s=1, или двигатель неподвижен. По мере увеличения скорости, s будет уменьшаться, а вместе с ним и Е2. Т. к. угол между Е1 и Е2 должен оставаться постоянным, то точка А будет перемещаться по окружности, описанной вокруг треугольника ВАС. При дальнейшем возрастание скорости Е2 будет уменьшаться еще больше, пока при синхронизме (s = 0) оно не сделается равным нулю, т. е. точка А переместится в В и напряжение сети будет уравновешивать только эдс статора Е1. При увеличении скорости за синхронизм, Е2 сделается отрицательным. При двойной синхронной скорости (s = — 1) точка А придет в А2, т. к. Е1 = — Е2. Из диаграммы видно, что если Е1 и Е2 при неподвижном двигателе равны, т. е. равны w1 и w2, то при разворачивании ротора E1, сперва увеличивается, а потом уменьшается. В таком двигателе момент вращения при пуске в ход будет неустойчив. Для того, чтобы Е1 все время уменьшалось, необходимо, чтобы E1 было больше Е2 и притом так, чтобы при пуске в ход Е2 было перпендикулярно к V (точка А1 на рис. 144).
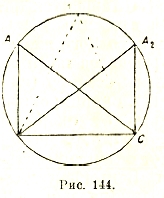
Рис. 144.
С другой стороны, для получения высокого коэффициента мощности необходимо, чтобы число витков ротора было больше числа витков статора, причем cos φ = 1 при синхронизме получается тогда, когда эдс Е1 при пуске перпендикулярна к V (точка А2 на рис. 144). Т. о. условия устойчивости и высокого cos φ противоречат друг другу и в обычном т. с. выполнены одновременно быть не могут. Поэтому часто на коллекторе т. с. располагают два комплекта щеток (подвижные и неподвижные), присоединенных к 6 концам сериес-трансформатора. Тогда, изменяя расстояние между щетками, легко при пуске выполнить условие устойчивости, а при работе — условие высокого коэффициента мощности.
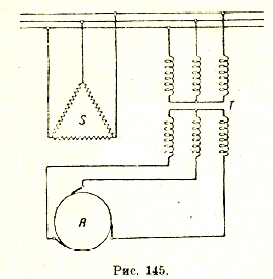
Рис. 145
d) Трехфазный двигатель шунтового возбуждения (т. ш.). Схема т. ш. показана на рис. 145. Статор S снова имеет такое же выполнение, как и у обычного асинхронного двигателя, ротор R представляет собой якорь машины постоянного тока, связанный через трансформатор с сетью. Трансформатор Т выполняется обычно в виде регулирующегося автотрансформатора. С электрической стороны описываемый двигатель представляет собой асинхронный двигатель, к ротору которого подводится напряжение сети (двигатель двойного питания). Т. к. частота тока в роторе иная, чем в сети, то связать ротор и сеть непосредственно нельзя, и роль коллектора сводится здесь к преобразованию частоты сети в частоту ротора. Это становится понятным, если вспомнить, что здесь, как и у обычного асинхронного двигателя, поле ротора вращается по отношению к неподвижному статору (или неподвижным щеткам) с синхронной скоростью, независимо от скорости вращения самого ротора, т. е. между щетками всегда будет индуктироваться эдс частоты сети. Векторная диаграмма т. ш. показана на рис. 146.
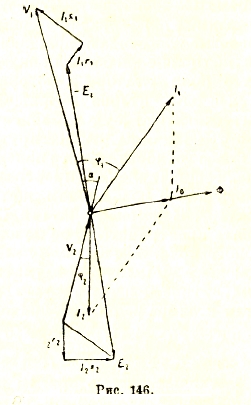
Рис. 146
Она отличается от диаграммы обычного асинхронного двигателя только наличием в роторе кроме эдс Е2, индуктированной вращающимся полем, напряжения, подведенного к ротору от трансформатора. V2 можно сдвигать по отношению к V1 либо смещая щетки, либо пользуясь трансформатором специальной конструкции (на диаграмме V1 и V2 сдвинуты на угол α). Если изменять угол α и одновременно изменять величину V2 ( путем изменения передаточного числа трансформатора), то тем самым можно влиять на наклон вектора I2r2, а, следовательно, и находящегося с ним в фазе вектора вторичного тока I2. Т. к. направление тока холостого хода І0 остается постоянным, то, поворачивая вектор I2 против часовой стрелки, мы одновременно поворачиваем и вектор І1. Увеличив в достаточной степени α и I2, можно привести векторы І1 и V1 к одному направлению, т. е. установить cos φ=1. Характерной особенностью т. ш. является возможность широкой и притом экономичной регулировки скорости в области как ниже, так и выше синхронизма. Сила тока в роторе асинхронного двигателя была равна I2 = E2/z2, где Е2 — эдс ротора, а z2 — его кажущееся сопротивление. В т. ш.
т. е. устанавливается геометрической разностью Е2 и V2. Если при том же моменте вращения, т. е. при том же токе I2 изменить V2, то сейчас же должно будет измениться и Е2, а это может произойти только за счет изменения скольжения, т. е. изменения скорости вращения. Изменив напряжение V2 мы заставим измениться и направление Е2, т. е. двигатель вынужден будет вращаться с сверхсинхронной скоростью. Недостатком описанного т. ш. системы Винтер-Эйхберга является наличие громоздкого регулировочного трансформатора и контроллера для управления этим трансформатором. Ввиду этого в настоящее время двигатели такой системы встречаются очень редко, будучи вытеснены, более простыми т. ш. системы Шраге-Рихтера. В этом двигателе регулировочный трансформатор как бы заделан в самую машину и составляет с ней органическое целое. Двигатель Шраге-Рихтера является обращенным, т. е. он питается со стороны ротора через три контактных кольца. Т. к. для работы машины безразлично, какая часть ее является первичной, а какая вторичной, то на существо дела это не влияет. Помимо этой главной обмотки А (рис. 147), на роторе в тех же впадинах расположена еще вспомогательная обмотка К с коллектором (на чертеже коллектор для ясности не показан) и шестью щетками, составляющими три отдельных комплекта. Статорная обмотка S состоит из трех несоединенных между собою фазных обмоток, причем концы каждой фазы статора присоединены к трем группам щеток. Щетки, принадлежащие к каждой группе, могут одновременно сдвигаться или раздвигаться. Их можно сдвинуть и так, что щетки каждой группы станут на одну и ту же пластину, т. е. обмотки статора окажутся короткозамкнутыми. Их можно также передвинуть из этого положения в противоположные стороны. Если щетки стоят на одной и той же пластине, то фаза статора замкнута накоротко, и двигатель ведет себя как обычный асинхронный двигатель, вращаясь со скоростью, близкой к синхронизму. Перемещая щетки в ту или иную сторону, мы добавляем к статорной эдс напряжение Ек2, индуктируемое вращающимся полем в дополнительной обмотке, или вычитаем его. Благодаря этому скольжение двигателя должно увеличиться или уменьшиться, что повлечет за собой уменьшение или увеличение скорости. Двигатели Шраге-Рихтера рассчитываются обычно так, чтобы число оборотов можно было изменять от ½ синхронного до 3/2 синхронного, т. е. в отношении 1:3.
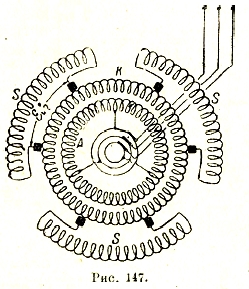
Рис. 147
е) Компенсированный асинхронный двигатель (к. а.). Большим недостатком обычного асинхронного двигателя является сдвиг фаз между током и напряжением, особенно резко проявляющийся при недогрузках. К. а. свободен от этого недостатка и позволяет при значительных изменениях нагрузки поддерживать cos φ = 1. На рис. 148 показана схема к. а. Гейланда. Этот двигатель имеет две статорных и две роторных обмотки. Статорная обмотка S1 и роторная R1 представляют собой нормальные обмотки обычного асинхронного двигателя.
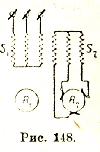
Рис. 148
Обмотка ротора R2 имеет коллектор с тремя щетками, присоединенными ко второй статорной обмотке S2. При работе к. а. в обмотке R2 индуктируется эдс, передаваемая в обмотку S2. Т. к. S2 и S1 связаны индуктивно, то фаза тока, поступающего из сети, определяется совместным действием обмоток S1 и S2. Смещая щетки на коллекторе, можно добиться того, что сдвиг фаз между напряжением сети и током статора исчезнет, т. е. cos φ станет равным 1. На рис. 149 показан другой к. а. системы Основа. Здесь, как и в двигателе Шраге, питание машины происходит со стороны ротора. На роторе имеются две обмотки, обычная трехфазная R1 соединяемая посредством колец с сетью, и обмотка постоянного тока R2, щетки которой присоединены к статорной обмотке S. Другие концы фаз статорной обмотки присоединены к пусковому реостату R. Благодаря наличию коллектора и здесь в обмотку статора добавляется некоторое напряжение, позволяющее довести cos φ до 1.
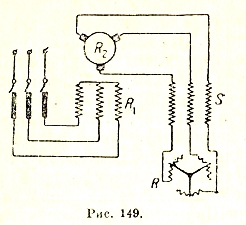
Рис. 149
f) Двигатель Шюлера относится к типу т. н. синхронизированных асинхронных двигателей, которые пускаются как асинхронные, а по достижении полной скорости переключаются на питание обмотки возбуждения постоянным током и тем превращаются в синхронные. Схема этого двигателя показана на рис. 150.
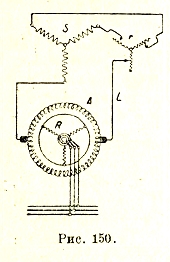
Рис. 150
Питание двигателя производится со стороны ротора, который имеет здесь две обмотки: нормальную трехфазную R и обмотку А с коллектором и двумя щетками. Статорная обмотка S присоединена концом одной фазы к левой щетке, а две другие фазы через пусковой реостат r присоединены к правой щетке. При пуске в ход двигатель работает как асинхронный, частота на коллекторе имеет величину, соответствующую асинхронизму двигателя. После вхождения в синхронизм на щетках появляется напряжение постоянного тока и статорная обмотка S становится обмоткой возбуждения.
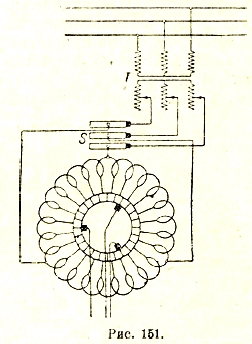
Рис. 151
Специальные машины. а) Преобразователь частоты. Из-за коммутационных затруднений коллекторные двигатели не могут быть построены быстроходными при большой мощности. В тех случаях, когда необходимо одновременно получить и быстроходность, и большую мощность, и свойства коллекторного двигателя, приходится прибегать к т. н. каскадным схемам, включающим в себя обычный асинхронный двигатель и отдельную специальную коллекторную машину (иногда несколько таких добавочных машин). Для целей экономической регулировки скорости больших асинхронных двигателей можно прибегнуть к каскадному соединению их е преобразователем частоты. Последний, как видно из рис. 151, состоит из якоря машины постоянного тока, снабженного одновременно и коллектором, и кольцами. Статор преобразователя частоты не имеет обмотки и служит лишь для замыкания силовых линий поля. Кольца S через посредство регулирующего трансформатора Т присоединены к сети, а щетки присоединяются к ротору главного асинхронного двигателя. Если якорь неподвижен, то напряжение сети создает вращающееся поле, которое, вращаясь относительно якоря с синхронной скоростью, вызывает между щетками напряжение той же периодичности, что и в сети. Если теперь якорь привести каким-либо посторонним двигателем в сторону, противоположную вращению поля, то число оборотов поля по отношению к неподвижным щеткам уменьшится и соответственно уменьшится и частота напряжения на кольцах. Т. о., изменяя скорость вращения, можно получить на щетках любую частоту от 0 (скорость вращения равна синхронной) до частоты сети (якорь неподвижен). Если посадить преобразователь частоты на один вал с асинхронным двигателем или соединить его зубчатой передачей (рис. 152), то частота напряжения на коллекторе всегда будет равна частоте тока в роторе двигателя.
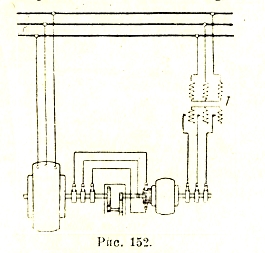
Рис. 152.
Регулируя напряжение на коллекторе трансформатором Т, можно воздействовать на скольжение асинхронного двигателя и регулировать его скорость. Т. к. по существу устройства преобразователь частоты представляет собою двигатель Винтер-Эйхберга, но без статорной обмотки, то для регулирования скорости можно воспользоваться и последним и тогда получится каскадное соединение асинхронного двигателя с коллекторным.
b) Фазокомпенсаторы. Для улучшения коэффициента мощности больших асинхронных двигателей прибегают к каскадному соединению их с особым фазокомпенсатором. Компенсатор Леблана состоит из якоря с коллектором и тремя щетками и статора, лишенного обмотки. Если к якорю подвести трехфазный ток, то обмотка создаст вращающееся поле, перемещающееся в пространстве с синхронной скоростью, не зависящей от скорости самого якоря, n=60f/p. Если якорь привести во вращение в ту же сторону со скоростью n1 то поток будет пересекать витки обмотки со скоростью n-n1 = sn и вызовет в обмотке эдс E=4,44 kwwsfФ·10-8. Эдс Е отстает от потока на 90°, но если увеличить скорость за синхронную, т. е. сделать S отрицательным, то Е также будет отрицательной и станет уже опережать Ф на 90°. Этим свойством и пользуются для компенсации сдвига фаз асинхронного двигателя включая фазокомпенсатор в цепь его ротора, как показано на рис. 153, и вращая якорь посторонним двигателем В с сверхсинхронной скоростью. На рис. 153 S — статор главного двигателя, К — фазокомпенсатор. В качестве фазокомпенсатора можно применить и рассмотренный нами выше преобразователь частоты, т. к., сдвигая щетки на его коллекторе, можно дать напряжению на щетках любую фазу.
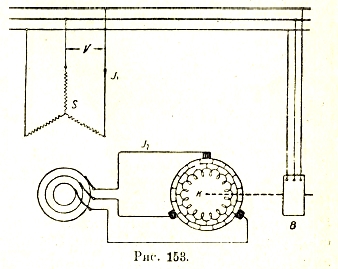
Рис. 153.
с) Сложные каскады. Помимо рассмотренных простых каскадных схем, в больших установках применяют сложные каскады, состоящие из главного асинхронного двигателя и ряда дополнительных машин: двигателей, преобразователей, генераторов, фазокомпенсаторов и т. д. Ввиду узко специального назначения этих агрегатов и многообразия систем, мы их рассматривать не будем, отсылая интересующихся к специальной литературе (см. в конце статьи).
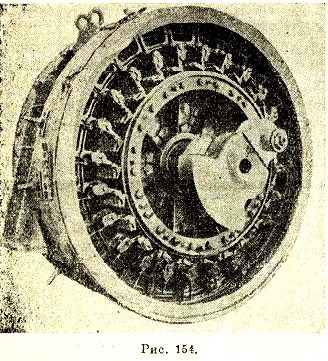
Рис. 154
Конструкции коллекторных машин. На рис. 154 показан железнодорожный сериесный однофазный двигатель мощностью 1500 л. с., с компенсирующей обмоткой и дополнительными полюсами.
Рис. 155
На рис. 155 показан репульсионный однофазный двигатель типа Дери, мощностью 10 кВт, 1500 об/мин. Справа, возле шкива, виден маховичок, служащий для перемещения щеток. На рис. 156 изображен трехфазный сериесный двигатель с двойным комплектом щеток, мощностью 22 кВт, n = 750 об/мин.
Рис. 156
Рис. 157
На рисунке 157 показан двигатель Шраге-Рихтера, мощностью 30 кВт с числом оборотов от 375 до 1000. На рис. 158 показан компенсированный асинхронный двигатель с роторным питанием (по Осносу) мощностью 30 кВт, 1 500 об/мин. На рис. 159 показано каскадное соединение асинхронного двигателя с преобразователем частоты (слева). Посредине видна зубчатая передача. На рис. 160 изображен фазокомпенсатор, приводимый во вращение асинхронным двигателем (слева).
Рис. 158
Рис. 159
Рис. 160.
Ртутные выпрямители (р. в.). За последние годы серьезными конкурентами для одноякорных преобразователей сделались ртутные выпрямители. Действие ртутных выпрямителей основано на так называемом вентильном действии вольтовой дуги, горящей в вакууме. Если стеклянный баллон, из которого выкачен воздух до высокой степени разряжения, впаять две проволоки, из которых одна соприкасается с ртутью налитой в баллон, а другая соединена с графитным или железным электродом, то такой прибор может служить элементарным выпрямителем тока.
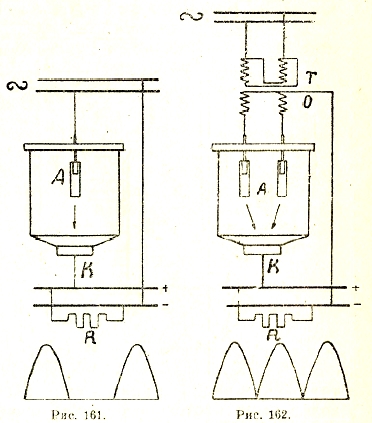
Рис. 161, 162.
Подведя к электродам напряжение, замкнув на момент цепь наклонением сосуда и разорвав эту цепь возвращением сосуда в первоначальное положение, мы получим между электродами устойчивую вольтову дугу. Если подвести к электродам переменный ток, то он сможет проходить только в направлении от железа или графита к ртути, т. е. только в том случае, если ртуть будет катодом, а другой электрод - анодом. При перемене полярности ток не будет проходить, даже если приложить к электродам напряжение в несколько тысяч вольт. Для того чтобы дуга не потухла после первого же полупериода переменного тока (дуга тухнет, если ее оставить без напряжения на 0,00001 сек., тогда как полупериод тока длится 0,01 сек.), в такой примитивной установке необходимо иметь дополнительное зажигательное приспособление, поддерживающее дугу в непрерывном горении. На рис. 161 показан наверху такой примитивный выпрямитель, а под ним — форма получаемого постоянного тока (чтобы не затемнять чертежа, зажигательное приспособление здесь не показано). Для того чтобы иметь возможность выпрямлять обе полуволны переменного тока, можно применять схему, показанную на рис. 162. Здесь между сетью и выпрямителем помещен трансформатор Т. К вторичной обмотке его присоединены два анода (А). Катод (К) присоединен к одному полюсу приемника постоянного тока (R), а к другому полюсу присоединяется нулевая (средняя) точка вторичной обмотки трансформатора. Здесь одна полуволна выпрямляется через один анод, а другая — через другой. Зажигательное приспособление (не показанное на чертеже) и здесь должно действовать непрерывно, т. к. через каждые пол периода напряжение падает до нуля. Форма выпрямленного тока показана внизу. Улучшить работу р. в. можно путем включения в цепь постоянного тока, дроссельной катушки L (рис. 163). Под влиянием дроссельной катушки кривая тока делается более пологой (рис. 163 внизу), и получается некоторое наложение волн друг на друга, так что ни в один момент сила тока не будет равной нулю. Тогда зажигательное приспособление после возникновения дуги может быть выключено, и дальше р. в. будет работать самостоятельно. На практике обычно приходится выпрямлять не однофазный, а трехфазный ток. Это достигается устройством трех анодов (рис. 164, обозначения те же). Как видно из нижнего чертежа, волнистость постоянного тока здесь значительно меньше, чем у однофазного р. в., т. к. отдельные волны перекрывают друг друга. Кроме того, ток, благодаря перекрытию, никогда не падает до нуля, и дуга поддерживается автоматически. Для еще большего сглаживания применяют р. в. шестифазного и двенадцатифазного тока. Схема шестифазного р. в. с шестью анодами показана на рис. 165. Применяя дроссели, можно добиться почти идеального сглаживания. Первоначально р. в. строились стеклянными. Такие приборы к настоящему времени строят до 200 А выпрямленного тока при напряжении до 500 В. Баллон современного стеклянного р. в. для выпрямления трехфазного тока показан на рис. 166. Небольшой отросток слева служит для присоединения зажигательного приспособления. Для получения больших мощностей в настоящее время строят р. в. со стальными баллонами.
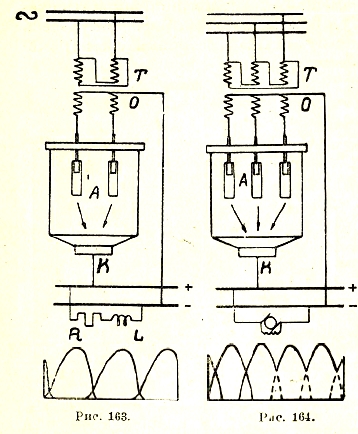
Рис. 163, 164
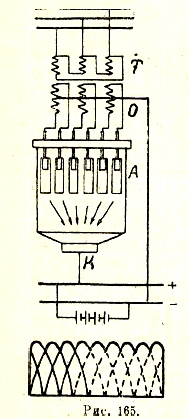
Рис. 165
Главным затруднением при конструировании металлических р. в. является устройство уплотнений в местах ввода электродов и в местах соединения крышек с корпусом. Эти уплотнения в настоящее время изготовляются либо комбинированными из асбеста и ртути, либо из свинца. Разрез современного металлического р. в. показан на рис. 167.
Рис. 166
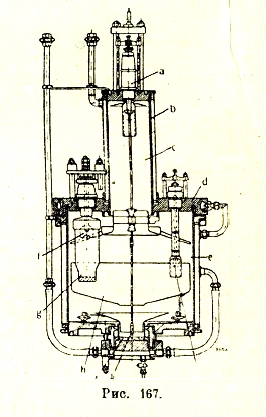
Рис. 167
Здесь а — зажигательное приспособление, b — охлаждающая рубашка, d — крышка, е — рабочий цилиндр, f — главный анод, g — анодный колпак, предохраняющий анод от забрызгивания ртутью, h - колпак, концентрирующий распространение дуги, і — катод, k — зажигательный анод, l — возбудительный анод. Зажигательное приспособление показано отдельно на рис. 168. При замыкании выключателя d постоянный ток от батареи проходит через сопротивления Ra, Rz соленоид а. Соленоид притягивает штангу зажигательного анода b, последний соприкасается с катодом с, и происходит зажигание, т. к. ток может теперь проходить от батареи и через цепь анода. Т. к. сопротивление этой цепи значительно меньше, благодаря отсутствию Rz, то через соленоид ток проходить почти не будет, и пружина f вернет зажигательный анод в прежнее положение. Весьма важными вопросами при эксплуатации больших р. в. являются охлаждение анодов и поддержание вакуума. Для первой цели аноды снабжают охлаждающими ребрами, а при очень больших мощностях устраивают их полыми и пропускают холодную воду. Для поддержания вакуума применяют особые вакуумные насосы, начинающие работать автоматически при повышении давления сверх допускаемых пределов.
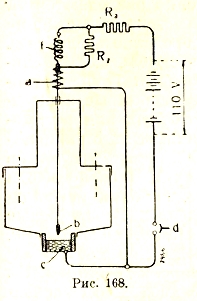
Рис. 168
Рис. 169
На рис. 169 показан р. в. большой мощности для выпрямления двенадцатифазного тока. Справа установлен вакуум-насос, приводимый в действие электродвигателем. Как и у одноякорных преобразователей, у р. в. существует определенное соотношение между величинами напряжений переменного и постоянного тока. Это отношение для различного числа фаз имеет следующие значения:
![]()
Здесь не учтено еще падение напряжения в самой дуге (около 20 вольт) и падение напряжения в дроссельной катушке. Т. к. падение напряжения в дуге приблизительно постоянно и почти не зависит от нагрузки, то к. п. д. р. в. мало изменяется с изменением нагрузки, но зато сильно зависит от напряжения выпрямленного тока. Чем выше последнее, тем больше и к. п. д. На рис. 170 дана зависимость к. п. д. от напряжения, из которой видно, что при больших напряжениях к. п. д. достигает весьма большой величины (до 98%).
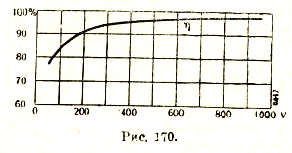
Рис. 170
На рис. 171 приведены для сравнения кривые к. п. д. р. в. (ηg), одноякорного преобразователя (ηe) и мотор-генератора (ηm) в зависимости от нагрузки. Из чертежа видно, что при недогрузках ηg изменяется мало, тогда как ηe и ηm падают очень резко. Современные р. в. изготовляются для напряжений до 16000 вольт и для токов до 3000—4000 ампер.
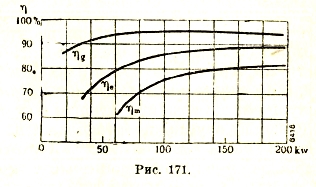
Рис. 171
Литература. Для более подробного ознакомления с теорией электрических машин могут служить следующие книги: акад. К. И. Шенфер, «Машины постоянного тока» (1934); инж. П. С. Сергеев, «Машины постоянного тока» (1930); проф. Ф. И. Холуянов, «Альтернаторы и преобразователи» (1933); проф. Ю. С. Чечет, «Генераторы и моторы переменного тока» (1931); профессор Ф. И. Холуянов, «Трансформаторы» (1934); акад. К. И. Шенфер, «Асинхроиные машины» (1934); академик К. И. Шенфер, «Коллекторные двигатели» (1934); инж. Л. Дрейфус, «Коллекторные каскады» (1934); профессор А. Г. Белявский, «Ртутные выпрямители» (1933).
Ю. Чечет.
| Номер тома | 52 |
| Номер (-а) страницы | 348 |