Электротехника. XX. Электрический привод в нефтяной промышленности
Электротехника. XX. Электрический привод в нефтяной промышленности применяется в самых широких размерах с использованием главным образом трехфазного асинхронного мотора; выбор двигателя происходит обычным способом с учетом правил взрыва и огнестойкости согласно норма ВЭС и требований горного надзора. Некоторые особенности представляет выбор двигателя для бурения (рис. 1) и откачки нефти.

Рис. 1. Нагрузочная кривая мотора, приводящего фрикционную установку вращательного бурения.
При ударном бурении используется явление резонанса между колебаниями балансира и системы; достижение резонанса на разных глубинах возможно, если мотор допускает плавную регулировку в широких пределах. Характер работы: опускание долота, уменьшение нагрузки, увеличение скорости; подъем долота, увеличение нагрузки, уменьшение скорости; все это требует регулировки скорости. В некоторых случаях необходимо быстрое реверсирование. Мотор должен иметь перегрузочный момент 2,5 — 3 раза от номинального. Огромный советский опыт показал, что наиболее рациональным является асинхронный мотор с числом оборотов 750 в мин. с контактными кольцами. Регулировка осуществляется введением реостата в цепь ротора. Определение мощности мотора см. таб. I.
Зная технологический процесс, строят диаграмму мощностей как функцию времени проходки скважины на более глубокой части и отсюда определяют среднеквадратичную мощность, на основании которой и подбирается мотор. Так как при вращательном (рис. 2) бурении большую роль играет правильная подача долота, то является целесообразной автоматическая его подача.

Рис. 2. Схема американской установки электрооборудования для вращательного бурения: 1 — линия 2 000—1000 В; 2 — трансформатор 2000 – 1000 В/220 В; 3 и 4 — масляный выключатель; 5 - насосный мотор 50 HP, 220 В, 750 об./мин.; 6 - контроллер; 7 — максимальное реле; 8 — амперметр; 9 — трансформатор тока; 10 — буровой мотор 57 НР, 220 В, 750 об/мин., 11 – добавочный контроллер, 12 – главный контроллер, 13 – соединительная муфта, 14 – редуктор; 15 – цепь Галля; 16 – лебедка вращательного станка; 17 – трансмиссионный вал; 18 – барабан; 19 – малая скорость; 20 – большая скорость; 21 – цепь Галля; 22 – ротор.
В системе Hidd’а одна коническая шестерня дифференциала соединена с буровым мотором, другая — с регулирующим мотором; ось дифференциала составляет одно целое с барабаном лебедки, на который навивается канат. Штанга подвешена на другом конце этого каната. Если оба двигателя работают с равными скоростями, но в разные стороны, барабан остается неподвижным; при равных скоростях в одну сторону вращения барабан работает на подъем; при вращении в одном направлении, но с разными скоростями, ось дифференциала, а, следовательно, и барабан, вращается со скоростью, равной полусумме скоростей обоих двигателей; при вращении в разные стороны с разными скоростями скорость барабана равна половине разности скоростей обоих моторов. Таким образом, достигается любая скорость, необходимая для бурения и вспомогательных работ. Мощность двигателя рассчитывают по сопротивлениям, связанным вспомогательными работами — подъем инструмента и колонны обсадных труб, — и проверяют в условиях реверсирования.
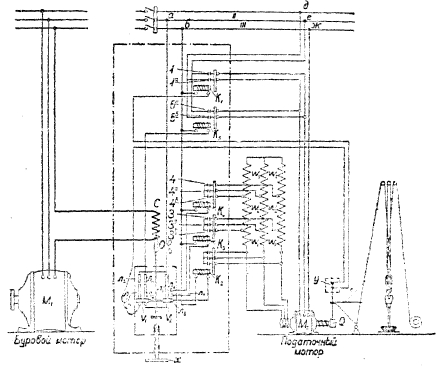
Рис. 3. Упрощенная электрическая схема автомата Скворцова.
Система Скворцова (рис. 3) принадлежит к автоматам с регулировкой по крутящему моменту, так как способность мотора к трехкратному моменту при чрезмерном нажиме на долото может привести к аварии (скручивание инструмента и пр.). Автомат состоит из: а) податочного электромотора М2; б) червячного редуктора, соединенного с мотором через скоростную коробку; в) амперметра-реле и магнитных контакторов сборки. Податочный мотор через редуктор приводит барабан лебедки, подавая инструмент или, после реверса, поднимая его. Между работой, податочного и бурового моторов — электромагнитная связь, осуществленная трансформатором тока, первичная цепь которого включена в одну из фаз бурового мотора, а вторичная замкнута через амперметр-реле. В зависимости от величины нагрузки, а следовательно силы тока (с), стрелка амперметра замыкает то одно, то другое реле контактора, заставляя податочный мотор то поднимать (при избыточном давлении), то опускать долото.
Для определения эквивалентной мощности желоночного мотора строят диаграмму, состояющую из трапеции (подъем) и прямоугольника (спуск). Большая сторона трапеции – начало подъема – определится по формуле:
![]()
где G — вес нефти в кг, G1 — вес желонки в кг, G2 - вес каната, в кг, v — скорость подъема в м/сек., ∑Q — потеря в системе в кВт, составляя 10—30% от Pмакс. Меньшая сторона трапеции — конец подъема — определится по той же формуле, но с соответствующим изменением ∑Q. Величину динамических усилий при трогании с места или определяют обычным способом, или оценивают ориентировочно в 10% Рмакс. Высота ординаты прямоугольника — потери во время спуска — оценивается в 4—6 кВт.
Применяемые типы двигателей для желонки — обычно асинхронные 30 — 80 кВт. При мощностях до 50 кВт с якорем Бушеро или глубоки пазом, напряжение 2-3 кВ, защита – максимальные и нулевые реле на масляных выключателях.
При откачке нефти глубокими насосами применяются двухступенчатые асинхронные моторы 1000/500 об./мин., 5,5/12 кВт, 220 В и 9/22 кВт, с герметически закрытыми кольцами, вынесенными на конец вала, с контроллером для регулировки и реверса, а также короткозамкнутые моторы 3,5 кВт.
За последние годы получены благоприятные результаты опытов с центробежным насосом, непосредственно соединенным с мотором. Такой агрегат погружается в скважину. При компрессорном способе мощность доходит до 85 кВт.
Литература: Л. И. Слоним, «Электрификация американской нефтяной промышленности» (1927); Л. Штейнер, «Электротехника в нефтяной промышленности» (1927); А. И. Ларионов «О выборе мощности электродвигателя в установках глубоких насосов на нефтяных промыслах» (1928); А. М. Станулис, «Автомат Скворцова; (1935); Л. И. Слоним, «Основы нефтепромысловой электротехники» (1932).
М. Евреинов.
| Номер тома | 53 |
| Номер (-а) страницы | 178 |