Механизм
Механизм
В настоящее время под названием механизма разумеют такое сочетание тел, в котором движение каждого из них относительно остальных тел механизма является вполне определенным, единственным и зависящим только от самого устройства механизма. Иначе говоря, каждое тело механизма имеет движете «вполне стесненное». Такая комбинация тел необходима для осуществлении машины (см.), в которой движение всех частей должно быть именно вполне определенным, зависящим только от устройства машины. Поэтому и говорят, что машина есть механизм, приспособленный для передачи работы, и изучение машин с точки зрения происходящих в них движений выделяется в особую дисциплину — теорию механизмов, называемую иногда прикладной кинематикой.
Изучение механизмов сводится к вопросу о несвободном, стесненном движении тел. Если мы представим себе тело (для простоты — геометрическое, неизменяемое), находящееся свободно в пространстве и ничем не поддержанное, ни к чему не прикасающееся, то такое тело может двигаться волне свободно; под действием системы сил оно будет описывать известный путь; если прибавится или убавится одна или несколько сил, то путь, описываемый каждой точкой тела, соответственно изменится. Но если тело положить на плоскость, считая ее прочной, так что тело в нее проникнуть не может, то движение тела будет уже несколько ограничено; каковы бы ни были силы, тело не может проникнуть в плоскость и, следовательно, будет двигаться все время только по одну сторону ее. Если прибавить вторую плоскость (или поверхность), так что образуется угол, то движение еще более стеснится. Идя далее в этом направлении, можно дойти, наконец, до таких комбинаций соприкасающихся тел, что движение каждого относительно других будет вполне определенным, и получится механизм. Для удобства при изучении механизмов рассматривают сперва комбинации двух тел, которые «соединены» друг с другом непосредственным соприкосновением так, что движение одного относительно другого будет вполне определенным. Такая комбинация двух тел называется кинематической парой, а каждое из тел называется элементом пары. Характер относительного движения двух элементов пары зависит, прежде всего, от формы прикасающихся поверхностей, а иногда и от размеров их. Различают низшие и высшие пары. Если прикосновение двух тел пары происходит по некоторой поверхности во все время относительного движения их, то пара называется низшей. Таких пар, как показывают геометрические рассмотрения, может быть только три: поступательная, вращательная в винтовая. В поступательной паре одно тело имеет в месте прикосновения к другому вид призмы, а в другом теле имеется такой же формы пустота (примеры: ползушка на счетной линейке, футляр и его крышка, ползун в паровой машине). Во вращательной паре одно тело очерчено по цилиндру, конусу или вообще по поверхности вращения, а в другом сделана такой же формы пустота. Чтобы тела здесь не скользили вдоль оси, требуются иногда заплечики (примеры: обыкновенный циркуль, дверная или оконная петля, шип в подшипнике). В винтовой паре элементами ее являются винт (с постоянным шагом) и гайка.
В поступательной и вращательной паре размеры тел совершенно не влияют на характер движения, а в винтовой паре влияет один размер — шаг винта.
Высших пар, в которых два тела прикасаются по линии или даже в одной точке (зубцы зубчатых колес, шарик и опорное кольцо у подшипника на шариках), может быть бесчисленное множество.
Соединяя несколько кинематических пар так, что элементы двух или более смежных пар сольются в одно целое тело, можно, наконец, получить системы из нескольких тел с движением настолько естественным, что относительные движения всех тел станут вполне определенными самой этой комбинацией их, и получится так называемая замкнутая кинематическая цепь. Если же одно из тел (звеньев) этой цепи закрепить неподвижно, то получается то, что называют механизмом.
Раз механизм построен, то каждое его тело имеет вполне определенное движение: каждая точка описывает некоторую кривую. Но обратная задача — построить механизм, который данному телу или данной его точке дал бы желаемое движение, — является неопределенной. И может иметь много решений. Поэтому задача изобретения механизмов для получения известного движения является неопределенной, и пока механизмы не были изучены систематично и научно, решение задачи изобретения механизмов всецело зависело от искусства, ловкости и опытности (а часто и от счастья) изобретателя. Только за последние 40 лет, с тех пор как Рело впервые дал свою теорию и анализ механизмов, дело стало на более твердую почву. Все важнейшие пары и механизмы теперь изучены, записаны, и во многих случаях изобретатель имеет уже материал, с которого может начать, и методы, при помощи которых он может преобразовывать механизм. В общем, это — задача преимущественно геометрическая. Но и сейчас, при изобретении новых машин и приборов, бывают затруднения. С одной стороны, уже давно были изобретены многие весьма сложные механизмы для сложных движений (см. автоматы), и теперь есть очень сложные работы (узорное ткачество, прядение, вышивание и др.), требующие сложных механизмов. С другой стороны, для некоторых простых движений первые машины были придуманы только очень недавно (швейная, пишущая и т. п.), а для некоторых несложных процессов мы и сейчас еще не имеем машин и принуждены производить их вручную (ткание бархата, точная пригонка путем пришабривания двух плоскостей и пр.).
Механизмы выполняются не только в виде машин, т. е. устройств для передачи работы, но осуществляются также и в виде различных приборов, или аппаратов (часы, счетчики, указатели и т. п.), в которых полезной работы не производится, а целью устройства является само движение.
Основным свойством механизма является, по его определению, то, что в нем движение каждого тела происходит по путям, предписанным только устройством механизма (формами прикасающихся поверхностен пар и отчасти расположением и размерами их). От сил, действующих на механизм от материала его частей и форм их в тех местах, где они не прикасаются друг к другу, и т. п. пути, описываемые точками механизма, не зависят.
При научении действия машин, кроме путей, приходится рассматривать и другие обстоятельства движения, например, скорости различных точек механизма. Всякий механизм обладает с этой точки зрения следующим свойством.
Во всякое мгновение движения механизма отношение скоростей двух произвольных точек механизма зависит тоже только от его устройства и не зависит от сил и пр. Иначе говоря, если мы будем в какой-нибудь момент времени знать в числах скорость только одной точке механизма, то мы можем тотчас же вычислить скорости всех точек механизма. Из этого следует, что если в машине мы скорость какой-нибудь точке ее увеличим в q раз, то и скорости всех прочих точек машины увеличатся тоже в q раз.
Так как скорости различных частей механизма и передаваемые от одной части к другой во время работы машины усилия связаны между собой так называемым законом передачи работы (который, в простейшем виде, в применении к поворачивающемуся рычагу, формулируется в известном предложении: «что выигрывается в силе, то теряется в скорости»), то из этого следует, что и усилия, действующие в разных местах механизма, тоже будут находиться между собой в определенных отношениях, обусловленных тоже только устройством механизма и не зависящих от абсолютной величины действующих на механизм внешних сил.
Эти три важных свойства механизма (относительно путей, скоростей и усилий) составляют основные законы, на которых зиждется так называемая теория машин (или механизмов), необходимая при решении различных вопросов о движении механизмов или машин.
Следует указать, что только сравнительно недавно введено в технику ясное представление о механизме и выделено в теорию механизмов рассмотрение всех тех вопросов, где идет речь только о характере и скоростях движения в разных точках механизма (машины). Создателем этой повой науки являлся Рело (см.), который в изданной им в 1875 г. книге «Theoretische Kinematik» настолько полно и обстоятельно установил учение о парах и о механизмах, что оно сейчас же вошло в прикладную механику и сделалось неотъемлемой принадлежностью высшего технического образования1). Рело в своей книге указал, какие важные услуги оказывает его метод. На ряде примеров он показывает, как многие машины, изобретенные в разные времена и в разных странах и, по-видимому, совершенно не похожие одна на другую по внешнему виду, на самом деле совершенно тождественны и все имеют один и тот же механизм; кажущаяся же разница обусловлена только различием в форме и размерах частей машин. Путем преобразования механизма, т. е. изменения форм и размеров частей, без изменения характера самих кинематических пар, можно из одного основного механизма получить целый ряд других. Прежде же в сочинениях о машинах описывали машины по внешним, несущественным признакам, что очень затрудняло систематизирование и ясное понимание сути машины. (Так, писали: «на прочном стальном валу, лежащем в бронзовых подшипниках, сидит широкое чугунное зубчатое колесо А с шестью спицами»... и т. п.).
1) В программы средних технических школ теория механизмов, к сожалению, проникает у нас очень туго (несмотря на полную возможность изложить ее элементарно), и в них изучение машин производится путем устарелых приемов описания по внешнему виду и несущественным признакам.
Действительная машина движется не совсем так, как ее идеализированный скелет — механизм. Все части машины, сделанные из реальных материалов, несколько деформируются (изгибаются, удлиняются и пр.), так что форма и движение будут немного иными. Кроме того, математически точное выполнение механизма по чертежу тоже невозможно, и вследствие неточности изготовления движение настоящей машины будет опять немного отличаться от того, которое предполагалось в теории механизмов. Но эти отступления в огромном большинстве случаев очень невелики.
Классификация механизмов и по настоящее время остается довольно неопределенной. Так, механизмы делят по характеру пар, из которых они составлены (механизмы только из поступательных, только из вращательных пар и пр.), или же по их назначению (направляющие механизмы, чаще всего для получения прямолинейного движения; парораспределительные механизмы для распределения пара золотниками, клапанами и т. п..; часовые механизмы; подъемные механизмы и пр.).
Так как форма частей механизмов вне мест прикосновения пар не имеет значения, то в книгах и на чертежах часто изображают механизмы условно, схематически, в виде, так сказать, скелета машины, отмечая приблизительно правдоподобно форму рабочих поверхностей пар и указывая всю промежуточную часть звена одной толстой линией.
Здесь дано несколько примеров механизмов:
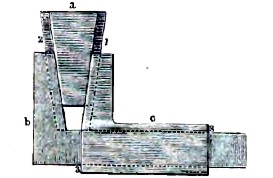
Фиг. 1. Механизм из трех поступательных пар; 1, 2 и 3 суть три поступательные пары; a, b и с суть три звена механизма, несущие каждое элементы (плоскости) от двух пар.
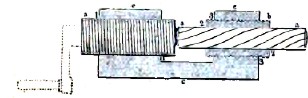
Фиг. 2. Механизм из трех винтовых пар: 1, 2 и 3 суть три винтовые пары; a, b и с суть три звена механизма.
Эти два примера дают механизмы с наименьшим возможным числом звеньев, так как меньше трех звеньев быть не может; при двух звеньях или телах мы получим просто кинематическую пару, а не механизм.
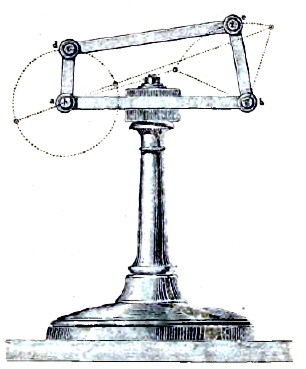
Фиг. 3. Механизм из четырех вращательных пар; зажат нижним звеном в подставке.
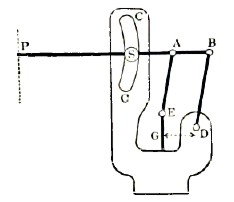
Фиг. 4. Схема направляющего механизма в индикаторе паровой машины: 4 вращательных пары, одна поступательная (стержень G, скрепленный с поршеньком индикатора) и одна высшая пара (цилиндрик 6 в прорезе СС).
Литература: F. Reuleaux, «Theoretische Kinematik» (1875); его же, «Lеhrbuch der Kinematik», zweiter Band (1900); S. Dunkerley, «Mechanism» (1905); Mac Cord, «Kinematics»; Schwamb and Merrill, «Elements of Mechanism»; F. Grashof, «Theoretische Maschinеnlehre, zweiter Band: Theoriе der Getriebe und der mechanischen Messinstrumente»; Haton de la Goupilliere, «Traité des Mécanismes» (1864), старое, но и сейчас очень полезное сочинение, где собрано много оригинальных механизмов, и имеется масса ценных теоретических замечаний; Н. И. Мерцалов, «Прикладная механика, ч. 1: Теория механизмов (курс Императорского Технического училища).
А. Сидоров.
| Номер тома | 28 |
| Номер (-а) страницы | 570 |