Регулятор
Регулятор. Регулятором вообще называется в технике всякое приспособление, служащее для поддержания какой-нибудь величины постоянной; так, бывают регуляторы температуры (см. термостат), давления (жидкости, пара и т. п.), уровня воды, скорости и т. д. Регуляторы приводятся в действие или рукой человека, или бывают автоматические, приходящие в действие при изменении регулируемой или связанной с ней величины. Наиболее распространены в технике регуляторы для поддержания постоянной скорости движения машин (ведущие начало от Д. Уатта), но за последние десятилетия вошли в употребление регуляторы для изменения скорости машин при постоянной движущей силе, употребляемые при насосах, компрессорах и т. п. Мы сначала рассмотрим регулятор для поддержания постоянной скорости машин - двигателей, служащих для движения фабрик и заводов, регулятор же для изменения скорости рассмотрим в конце статьи.
Для всех производств существует или своя постоянная, наиболее удобная скорость, или определенный порядок изменения скорости, осуществляемый устройством машины-орудия, двигатель же все время должен идти (чаще всего — вращаться,) с неизменной, постоянной скоростью. Для того, чтобы эта скорость не изменялась, и служит регулятор. Он обыкновенно приходит в действие автоматически, благодаря изменению скорости двигателя (и всей связанной с ним фабричной установки), вызываемой тем, что изменилась или движущая сила (давление пара, напор воды и т. п.), или же сопротивление фабрики (изменилось, случайно или по ходу работ, число действующих станков или машин-орудий, изменились сопротивления обрабатываемого на станках материала и т. п.). От такого изменения нарушается состояние динамического равновесия между движущей силой двигателя и полным сопротивлением фабрики, и двигатель начинает идти ускоренно или замедленно, а вместе с ним и машины-орудия, отчего портятся изготовляемые предметы, тухнут или перегорают электрические лампочки, рвется пряжа и т. д. Поэтому и необходимо восстановить как можно скорее такое состояние вещей, чтобы работа двигателя за единицу времени снова была равна работе всех сопротивлений (полезных и вредных) и вращение двигателя вновь стало равномерным. Это и делает регулятор, изменяя, при изменении сопротивления, движущую силу, а при изменении движущей силы — восстанавливая ее величину (например, увеличивая степень наполнения парового цилиндра при понижении давления пара, и т. п.).
Автоматическое регулирование применяется преимущественно при двигателях фабрик, заводов и силовых станций вообще; машины со своим единичным сопротивлением (паровозы, пароходы, шахтные подъемные машины, реверсивные прокатные машины и др.) регулируются машинистом от руки. Регулирование скорости умышленным изменением сопротивления (посредством тормозов; см.) обычно делается от руки (но иногда, — например, при разрыве поезда, — тормоза действуют и автоматически, хотя здесь регулятора и нет).
Регулятор отзывается на изменение скорости машины вследствие изменения какой-нибудь физической величины, зависящей от скорости движения машины и связанного с нею регулятора; иногда это бывает сопротивление жидкости движению, чаще же всего — центробежная сила (см.) какой-нибудь вращающейся части регулятора, и такие регуляторы называются центробежными.
Сущность действия такого регулятора состоит в том, что после незначительного, не вредного для хода производства, изменения скорости (обычно на 2—3%) упомянутая выше часть регулятора передвигается несколько в регулятор и развивает при этом силу, достаточную для того, чтобы через посредство промежуточных механизмов переставить орган, пускающий в двигатель пар, воду, электричество и пр., и привести его в такое положение, чтобы восстановить равномерное движение машины. Передвигающаяся от действия центробежной силы часть регулятора (груз, или «шар») может в нем или двигаться поступательно, или качаться вокруг оси, и все время, пока регулятор вращается, груз стремится, благодаря центробежной силе, удаляться от оси вращения регулятора, но этому препятствует какая-нибудь сила — вес самого груза (и добавочных масс), сила пружины и пр. При неизменной скорости вращения машины и связанного с нею регулятора, этот последний пускает в машину именно столько движущего тела (пара, воды и пр.), сколько нужно для равномерного движения ее; если скорость машины изменяется, то груз регулятора передвигается и изменяет движущую силу, увеличивая ее при замедлении хода и уменьшая при ускорении, и делает это до тех пор, пока опять не восстановится равенство работ силы и сопротивления за один период машины или за единицу времени при новом положении груза.
Такое восстановление может наступить или при той же скорости, какую имела машина перед регулированием, или при несколько иной скорости; это зависит от системы регулятора. Если имеет место 1-й случай, т. е. если груз регулятора в различных положениях остается всегда в равновесии при одной и той же скорости, то регулятор называется астатическим; если же всякому новому положению равновесия груза соответствует новая скорость, то регулятор называется статическим, и надобно устроить его так, чтобы скорости при различных положениях не разнились значительно одна от другой. Астатический регулятор дает неизменную скорость машине, но он действует очень неспокойно, прыгает и не употребляется в машинах; статический регулятор действует спокойнее и применяется везде. Отношение разности его числа оборотов при двух крайних положениях к среднему числу оборотов δ=(n1-n2)/n называется степенью неравномерности и делается малым (обычно 0,01—0,02). Разнообразные конструкции регулятора возникли, прежде всего, вследствие желания получить малую δ.
Кроме степени неравномерности, устанавливают еще понятие о степени нечувствительности регулятора. Для того, чтобы груз регулятора начал двигаться, преодолевая неизбежное трение в самом регуляторе и перестановочном механизме, необходимо некоторое конечное (а не бесконечно малое) изменение скорости машины и регулятора; если машина делала ns оборотов, то для того, чтобы регулятор начал действовать, число оборотов должно возрасти до n' или упасть до n''; отношение ε=(n'- n'')/ns называется степенью нечувствительности регулятора, и хотя оно различно для разных положений груза, но в практике берут среднюю величину при обычном трении. Чем ε меньше, тем скорее регулятор начинает действовать; обычно ε = 0,02 до 0,03.
Сила, которую развивает регулятор при известной величине и которая производит перестановку органа, пускающего движущее тело в машину, будет тем больше, чем больше масса «груза» и других частей регулятора или чем сильнее пружина. Эта перестановочная сила не может быть очень велика, так как регулятор вышел бы очень массивен. В связи с этим различают регулятор прямого и непрямого действия. Там, где перестановка органа впуска рабочего тела не требует большой силы (паровые машины, небольшие паровые турбины, двигатели внутреннего сгорания), регулятор прямо и производит эту перестановку своей силой, заменяя руку человека. Там же, где для этого требуется большая сила (водяные турбины, большие паровые турбины и т. п.), устраивают регулятор непрямого действия. В них работу перестановки совершает не сам регулятор, а особый двигатель (сервомотор, или механическое реле), достаточно сильный, а регулятор лишь открывает или закрывает клапан и т. п. для пуска его в ход и остановки, на что требуется небольшая сила. Сервомотор может приводиться в действие чем угодно (паром, электричеством, сжатым воздухом и пр.), но в современных водяных и паровых турбинах он почти всегда приводится в действие гидравлическим давлением воды или масла, действующим на поршень цилиндра и вызываемым специальным насосом (см. турбины, XLI, ч. 10,57,58).
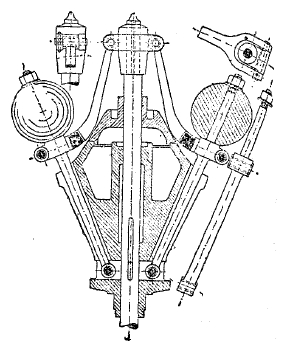
Фиг. 1.
Для того, чтобы регулятор исполнял свою роль — переставлял орган впуска в новое, надлежащее положение и производил это возможно быстро и без колебаний взад и вперед, — необходимо заранее выполнить некоторые условия. Изучение этих условий и сейчас еще не закончено, хотя изучение хода процесса регулирования и сделало за последние 30 лет большие успехи. Раньше изучали только регулятор как прибор, а сложный процесс взаимодействия его и машины не рассматривали, вследствие чего нередко регулятор работал плохо, с постоянными колебаниями. Теперь изучают и процесс регулирования. Чтобы регулятор производил перестановку спокойно, без колебаний, необходимо известное минимальное трение в нем (иногда усиливаемое введением сопротивления жидкости в особом цилиндре с поршнем, катаракте) и некоторый минимальный вес маховика (или вообще момент инерции вращающейся части двигателя). В выяснении этих вопросов значительная доля работы принадлежит русским ученым; Вышнеградскому, Грдине, Жуковскому. Задача о ходе процесса регулирования есть одна из труднейших задач теоретической механики.
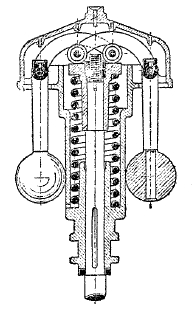
Фиг. 2.
По расположению частей центробежные регуляторы можно разделить на два класса: 1) регуляторы с коническим маятником; 2) регуляторы плоские (другие типы встречаются редко).
Регуляторы с коническим маятником (прототип — регулятор Уатта) имеют ось (почти всегда — вертикальную) к которой приделаны, перпендикулярно к ней, шарниры, вокруг которых и качаются «грузы», участвующие вместе с шарнирами во вращении регулятора. У плоских же регуляторов оси шарниров параллельны оси вращения Р, и здесь «грузы» качаются в плоскости вращения регулятора, отчего и произошло название «плоский регулятор» (иногда их называют неудачно; регуляторы в маховике, регуляторы осевые). В регуляторах конических отклонению трудов часто препятствует их собственный вес и еще вес «муфты», но иногда для этого вводится и пружина; в регуляторах плоских вес действовать не может, и здесь отклонение грузов всегда сдерживается пружиной, одной или несколькими. Регулятор конический обычно имеет свою собственную ось, получающую движение от вала машины посредством шестерен; регулятор плоский сидит почти всегда на валу машины (иногда и на добавочном) и переставляет (в паровой машине) непосредственно эксцентрик, изменяя тем отсечку пара в цилиндре. Плоские (и вообще пружинные) регуляторы гораздо сильнее, чем регуляторы конические без пружин.
Конструкций тех и других — множество. Приведем типичные примеры. На фиг. 1 — регулятор Прелля, у которого ручки грузов качаются вокруг шарниров, находящихся в поднимающейся муфте (так называемое «обратное подвешивание»); иногда, в помощь весу муфты, вставляется еще и пружина. На фиг. 2 — регулятор Бейера, у которого шарниры грузов тоже помещены в муфте и поднимаются вместе с ней; здесь расхождению шаров тоже противодействует и вес муфты, и пружина. На фиг. 3 — регулятор Толле с двумя пружинами, изменяя натяжение которых можно изменять и число оборотов регулятора и машины) и степень неравномерности регулятора.
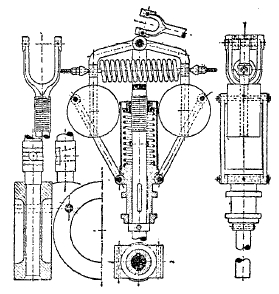
Фиг. 3.
На фиг. 4 показан плоский регулятор Дерфеля с двумя пружинами, переставляющий сразу два эксцентрика — впускной и выпускной.
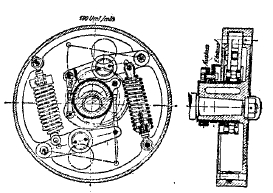
Фиг. 4.
(Пример регулятора Портера см. XXXI, 275/76. табл. 1, R; расположение плоского регулятора при клапанном распределении см. XXXI, 286, фиг. 15; расположение различных регуляторов для воздействия на клапаны двигателей внутреннего сгорания см. двигатели внутреннего сгорания, ХVIII, 31/32, прил. 82'/88'). Турбинные регуляторы непрямого действия очень сложны; см. о них в специальных сочинениях по паровым и водяным турбинам. (О часовых регуляторах см. часы, ХLV, ч. 3, 620/23).
Фиг. 5.
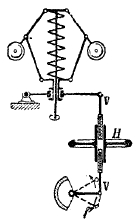
Теперь скажем о регуляторах для изменения скорости, которые их изобретатель инженер Weiss довольно неудачно назвал регуляторами мощности (Leistungs-Regulator). В то время как на фабриках и заводах необходимо для сохранения постоянной скорости станков поддерживать постоянную скорость двигателя, изменяя движущую силу пропорционально изменению сопротивления фабрики, при насосах, компрессорах и т. п. является надобность решать обратную задачу: по условиям потребления воды, иной жидкости или газа требуется изменять количество подаваемой в единицу времени жидкости. Для этого надобно давать насосу или компрессору различное число оборотов в минуту, но напор воды или давление газа при этом должны остаться неизменными, а стало быть и движущая сила двигателя должна оставаться постоянной. Поэтому в паровой машине фабрики регулятор при уменьшении сопротивления должен, например, уменьшить отсечку пара в цилиндре от 0,8 до 0,2, сохранив неизменным число оборотов 100 (или давая ей 101 оборот), при насосе же регулятор должен сохранить неизменной отсечку 0,3, но поддерживать ее уже не при 80 оборотах насоса, а, например, при 36 в минуту, сообразно меньшей потребности в воде. Значит, регулятор мощности должен обратно регулятору скорости обладать очень большой степенью неравномерности и, во время регулирования, значительно замедлять или ускорять ход насоса, сохраняя неизменной движущую силу, регулятор мощности бывает или полуавтоматическим, или совершенно автоматическим. Схема 1-го типа дана на фиг. 5. Для изменения числа оборотов машинист рукой поворачивает маховичок Н, навернутый своей втулкой на правую и левую резьбу стержней V и V, сцепляющих муфту регулятора с золотником Ридера; пусть требуется увеличить подачу воды — тогда машинист вращает Н так, чтобы отсечка увеличивалась, машина идет скорее, регулятор же уменьшает отсечку, стремясь сохранить прежнюю, и когда маховичок Н оставят в покое, машина идет скорее прежнего, и регулятор эту скорость, теперь и поддерживает при прежней отсечке пара.
Вполне автоматический регулятор мощности устроен и работает подобным же образом, но только у него поворот маховичка Н (или иная соответствующая операция) производится не рукой машиниста, а автоматически, в зависимости от изменения уровня воды в баке или давления газа в резервуаре и т. п.
Фиг. 6.
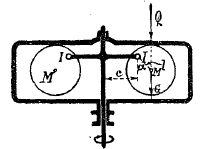
Схематический чертеж регулятора Вейсса дан на фиг. 6. Регулятор похож несколько на уаттовский, но, для получения большей степени неравномерности, точки подвеса J ручек грузов отнесены далеко от оси вращения регулятора, а длина l=IM от центра груза до оси подвеса взята очень малой; муфту грузы несут на себе и заключены в ней, так что снаружи регулятор есть просто круглый барабан. Более совершенным и безопасным против возрастания скорости и разноса машины является регулятор Штумпфа.
Регуляторы мощности позволяют изменять число оборотов в 3 и даже 4 раза (например, от 30 до 90 и до 120).
Литература о регуляторах очень обширна. Укажем следующие сочинения: М. Tolle, «Die Regelung dеr Kraftmaschinen»; А. Сидоров, «Плоские регуляторы быстроходных машин»; Л. Левенсон, «Плоские регуляторы»; Я. Жуковский, «Теория регулирования»; А. Budau, «Beiträge zur Frage dеr Regulierung hydraulischer Motoren»; L. Walther, «Dynamik der Leistungsregelung».
А. Сидоров.
| Номер тома | 36 (часть 1) |
| Номер (-а) страницы | 237 |