Электротехника. XIII. Электропривод
Электротехника. XIII. Электропривод. Первые годы мотор рассматривался главным образом как источник механической энергии наравне с другими видами двигателей внутреннего сгорания и паровых машин. В то время основной задачей конструкторов-электриков было лишь улучшение кпд и cos φ моторов, так как механические передачи всякого рода, особенно канатные и ременные, имели сравнительно высокий кпд и борьба с ними могла быть успешной лишь при условии одинаковой рентабельности в эксплуатации. С своей стороны механики не меньше усилий приложили для улучшения кпд механических передач. За первый период развития электротехники усилия инженеров были устремлены главным образом на то, чтобы повысить кпд районных электрических станций до 25%, что удалось достигнуть в современных и лучших станциях. Обычно же кпд не превышает 18-20%.
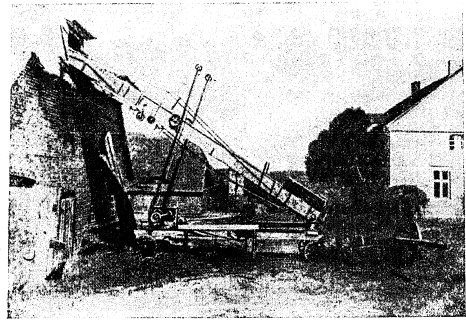
Рис. 1. Подвижной разгружатель с одиночным приводом.
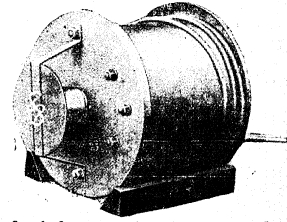
Рис. 2. Электрический мотор, передвигаемый путем откатки.
Следующей областью потерь, обратившей на себя внимание, оказалась передача энергии с помощью трансмиссии. Механическая передача от энергетического центра к рабочим машинам с длинными трансмиссиями и бесконечным рядом последовательно включенных канатных, зубчатых и других передач поглощала на себя в пути больше половины энергии. В подавляющем большинстве случаев механический (с помощью трансмиссии) способ распределения энергии даже на сравнительно малых площадях завода экономически нерационален. И только в отдельных случаях для коротких трансмиссий возникающие сомнения следует решать сравнительным подсчетом выгодности двух вариантов — группового трансмиссионного и одиночного привода путем сравнения капитальных вложений и эксплуатационных расходов (ср. трансмиссии, XLI, ч. 9, 122). Рис. 1—14 показывают несколько типовых для сельского хозяйства одиночных приводов, где мотор в большинстве случаев соединен с машиной ременной передачей от рабочего шкива мотора на рабочий шкив машины. Передвижной транспортер для нагрузки и разгрузки грубых кормов, мешков с зерном и т. д. в одном случае приводится от, мотора, установленного на раме разгружателя (рис. 1), в другом — от нового типа мотора, представляющего собой цилиндрическое тело (рис. 2). Такой мотор в качестве универсального мотора передвигается с места на место путем откатки. В третьем варианте привод осуществляется от мотора, помещенного на тележке. В тех случаях, где машина работает с небольшим числом часов использования в году, для лучшего использования мотора на других работах и уменьшения размера капиталовложений и амортизационного процента целесообразно применение универсальных переносных (рис. 3) или передвижных (рис. 4) моторов. Питание мотора производится или гибким кабелем от штепселя, или с помощью особых токосъемов на шестах, приключающихся к голым проводам воздушной магистрали.

Рис. 3. Переносной мотор.
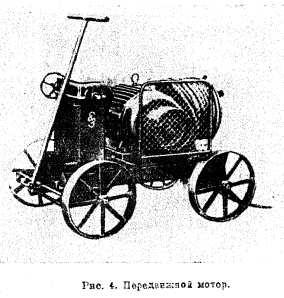
Рис. 4. Передвижной мотор.
Различные способы соединения мотора с центробежным насосом для понижения уровня грунтовых вод или для осушки болот представляют рисунки 5—7. От ременного привода (рис. 5) переходят к непосредственному соединению с помощью жесткой муфты (рис. 6), и, наконец, на рис. 7 мотор представляет одно целое с телом насоса, и весь агрегат становится не только легко монтируемым, но и легко приспособляемым к переменному уровню откачиваемых вод с помощью цепи.

Рис. 5. Мотор, соединенный с насосом ременной передачей.
Рис. 6. Мотор, соединенный с насосом жесткой муфтой.
Рис. 7. Непосредственное соединение мотора с насосом в одной чугунной отливке.
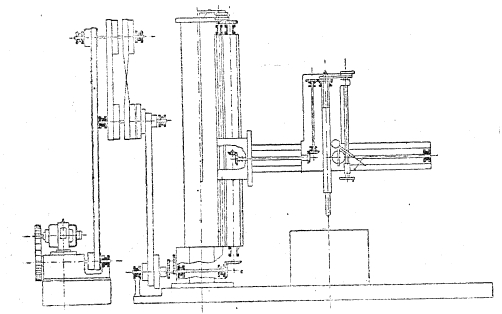
Рис. 8. Устарелый привод сверлильного станка от мотора через промежуточную трансмиссию.
С переходом от группового к одиночному приводу еще остается ряд слабых мест, являющихся источником потерь. Распределение энергии внутри рабочей машины или станка не менее сложно и влечет за собой не менее потерь, чем способ распределения энергии с помощью трансмиссии. Один энергетический центр во многих случаях необычайно усложняет механизацию, нагромождая нередко ряд передач (рис. 8), эксцентриков и зубчаток для удовлетворения производственных требований, предъявляемых машиной, и в первую очередь — требования регулирования скорости иногда по сложной заранее заданной кривой. Эти два обстоятельства (сложность передачи при одном энергетическом центре и необходимость регулировать скорость) предопределили два следующих этапа в эволюции мотора: передачу мотору, кроме функций механического двигателя, целого ряда производственных функций машины и переход от одного мотора, как энергетического центра, к ряду более мелких моторов, расположенных вблизи от рабочих частей машины — потребителей энергии. В связи с этим мотор в ряде случаев сделался частью машины. Как повлияло это на потери в станке? Испытания малого строгального станка обычной конструкции с контрприводом показали, что при малой нагрузке кпд какого станка составляет всего лишь 6%. С переходом к электрическому приводу, где мотор явился органической частью станка и уничтожил промежуточные трансмиссии, кпд увеличился до 20%. Как это отразится на расходе топлива на пути от топки котла до резца станка? Первый случай - электрический групповой привод. Принимая:
КПД станции 20%
КПД сетей и трансформаторов 83%
КПД мотора 89%
КПД трансмиссии 70%
КПД станка 6%
получаем в первом случае общий кпд = 0,20·0,85·0,80·0,7·0,06 = 0,0063, или, приблизительно 0,6%. Это значит, что на каждый полезно использованный кг угля при строгании нужно сжечь в топке котла около 167 кг угля. Во втором случае, при одиночном приводе, примем:
КПД станции (как и выше) 80%
КПД сетей и трансформаторов 85%
КПД мотора 80%
КПД станка 20%
Общий кпд составит 2,72%; это означает, что на каждый полезно использованный кг угля придется около 37 кг угля, сожженного в топке. По сравнению с первым случаем мы сэкономим 167 — 37 = 130 кг угля, или 78%.
Во многих рабочих, машинах и станках имеется не один рабочий орган, который нужно привести в движение, а несколько. В этом случае, если даже мотор и представляет одно органическое целое с машиной, все распределение энергии внутри рабочей машины производится путем всякого рода шестерен, ремней и других механических передач. В этом случае неизбежны последовательная передача энергии от одного рабочего органа к другому и то понижение, то повышение числа оборотов с громадными механическими потерями внутри самой машины. В данном случае концентрация приема энергии в одном месте совершенно аналогична групповому приводу со многими трансмиссиями с приводом от одного мотора. Поскольку в подавляющем большинстве случаев одиночный привод выгоднее группового, постольку и концентрация приема энергии в одном месте невыгодна при наличии сложной машины и должна быть заменена подводом энергии электрическим путем непосредственно к основным рабочим органам этой машины. Короче говоря, необходим переход от одного мотора к нескольким моторам, непосредственно органически связанным с основными рабочими органами этой машины, т. е. переход от одиночного привода машины к многомоторному приводу, в нужных случаях — с функциональными моторами.
Следующий важный как для промышленности, так и для сельского хозяйства этап — это кнопочное включение мотора. Существующие системы позволяют простым нажатием кнопки пускать или останавливать моторы как постоянного, так и переменного тока, однофазные и трехфазные, с реостатным пуском или без него. Кнопочная система интересна еще потому, что позволяет управлять мотором путем системы легких, дешевых проводов на любых расстояниях в пределах завода, совхоза или колхоза, а в некоторых случаях (например, для целей дождевания, орошения или водоснабжения) и вне усадеб. В этом случае мы имеем дело как будто на первый взгляд преждевременно, с частичной автоматизацией, но эта автоматизация сможет сберечь до 90% рабсилы, необходимой для включения и выключения мотора. Кроме того, кнопочная система способствует автоматизации целого ряда процессов, где электрический мотор и вообще электричество в недалеком будущем будет играть решающую роль*).
*) Наш харьковский электромагнитный завод «ХЭМЗ» уже выпускает такое оборудование.
Для сельского хозяйства, где разбросанность на больших площадях требует времени на переходы и на переезды от мотора к мотору, а также ввиду недостаточно подготовленных кадров, этот вопрос не менее важен, чем для промышленности.
Правильный выбор мотора поведет к экономии в сотни миллионов рублей в народном хозяйстве. Подсчеты Германии в 1927 г. показали, что с переходом к рациональному электрическому приводу и правильно выбранной мощности мотора только с одной металлической промышленности может быть достигнута экономия на стоимости электрической энергии свыше чем на 100 млн. золотых марок. С другой стороны, бесперебойность в работе, уменьшение ремонта, удлинение срока службы зависят от правильного понимания физической стороны явлений, связанных с электроприводом и знакомством с основами электропривода.
Определение мощности электрического мотора в различных условиях нагрузки. Основана задача мотора – развить заданную скорость и нужный крутящий момент в каждый заранее заданный промежуток времени, иногда по сложным кривым (пример кольцевого ватера или шахтного подъемника), без вредных перегревов частей мотора и без удорожания стоимости мотора и добавочных потерь в нем при излишнем увеличении размеров мотора. Следовательно, в этом случае задача сводится, после выбора способа регулировки скорости, к установлению правильной мощности мотора. Метод определения этой мощности для одиночного привода отличается от метода расчета мотора для группового привода. После определения мощности мотора задача сводится к выявлению возможности уменьшения найденной мощности (для постоянной нагрузки) в зависимости от режима работы, что имеет место при кратковременной или повторно кратковременной нагрузке.
Основным для всякого режима работы моторов является определение величины тех сопротивлений всякого рода, которые возникают в рабочей машине и преодолеть которые составляет задачу мотора. Для этой цели служит уравнение, связывающее силы S и сопротивления W, действующие в системе мотор-машина:
![]()
1) Система получит ускорение, если сила, развиваемая мотором, больше сопротивления, оказываемого машиной или станком; 2) система останется в прежнем состоянии, если приложенная сила и преодолеваемое сопротивление равны; 3) если сила меньше преодолеваемого сопротивления, движущая система испытывает замедление тем большее, чем меньше применяемая сила.
W является статическим сопротивлением и состоит из одного или двух сопротивлений: трения и тяжести.
а) Трение (ср. трение, XLI, ч. 9, 170 сл.). При наличии двух соприкасающихся, движущихся поверхностей при нормальном давлении Wтр = μN кг, где μ – коэффициент трения при скольжении есть функция материалов, из которых сделаны трущиеся поверхности, степени обработки поверхностей, смазывающихся веществ, давления на единицу поверхности, скорости и температуры μ = 0,16 при трении железа по бронзе.
Если имеем дело с цилиндром или колесом, катящимся по плоскости без скольжения, для поддержания движения колеса необходим вращающий момент M = μ’, где μ’ — коэффициент трения при катящемся движении, μ’ = 0,01—0,04 для электрокар.
Эти коэффициенты трения играют большую роль в электрических железных дорогах, определяя особо сопротивление пути в зависимости от скорости движения. К группе сопротивлений трению нужно отнести вообще всякое сопротивление, связанное с деформацией материала, что имеет место при всех обрабатывающих машинах в таких процессах, как штампование и резка металла, короче говоря — при всякого рода принужденных изменениях в положении молекул между собой; так, например, сопротивление резанию Wрез = gkza, где g — сечение стружки, kz — сопротивление разрыву и а — коэффициент, характеризующий резец.
б) Сопротивление тяжести Wтяж. = Q возникает при подъеме грузов, воды, молотов, прессов. Оно не зависит, конечно, от скорости. Мы различаем два случая такого сопротивления: при вертикальном подъеме и при подъеме по наклонной плоскости. В первом случае при высоте груза h работа будет равна А = Qh кг и накопляется телом в форме потенциальной энергии, которую мы можем выиграть обратно, опустив груз, за вычетом, конечно, потерь от трения.
Во втором случае разлагаем тяжесть груза на 2 слагающих: вдоль пути и перпендикулярно пути, тогда сопротивление тяжести Wm = Q sin α кг.
При вычислении подъемников или шахтных установок работу, производимую силой, необходимой для преодолевания сопротивления трения, исчисляют как добавочный груз к полезному грузу. В электрических железных дорогах в горных местностях при спусках заставляют работать моторы электровоза как генераторы на сеть и таким образом превращают потенциальную энергию поезда в электрическую (ср. электротехника — железные дороги, LII, 632 сл.).
в) Сопротивление инерции (динамическое). Динамическое сопротивление дает себя знать только при изменениях скоростей, в частности — при разбеге и останове двигателя. В первом случае необходима сила для преодоления возникающего динамического сопротивления. Изменение в скорости наступает всякий раз при избытке или недостатке в силе для преодоления статического сопротивления. При прямолинейном движении масс:
Wдин. = m dv/dt;
для вращающихся масс:
![]()
где М - момент, необходимый для преодоления инерции вращающегося тела. Необходимая работа для преодоления динамического сопротивления на пути ds:
т. е. равна выражению живой силы.
Эта кинетическая энергия, запасенная движущейся системой, может быть использована в случае, когда нужно уменьшить скорость движущихся масс или остановить их совершенно. Для прямолинейного движения вращающихся масс будем иметь:
![]()
Кроме перечисленных сопротивлений, всякое движущееся или вращающееся тело встречает:
г) сопротивление воздуха. Пусть поверхность F движется со скоростью v в направлении своей нормали. Тогда объем воздуха, находящийся перед этой поверхностью, получает ускорение от 0 до v. Объем ускоряемого воздуха в секунду равен vF, а его вес g = γ.v.F, где γ — вес одного кубического метра воздуха (1,29 кг при температуре 15°С). Это количество воздуха имеет массу
![]()
Эта масса должна получить ускорение в секунду до v метров.
Сопротивление этой массы воздуха ускорению выразится:
![]()
Мы видим, что сопротивление воздуха растет с квадратом скорости. Это становится заметным при больших скоростях, например, при движении электрических поездов дальнего следования. При вычислении сопротивления воздуха при больших скоростях вводится коэффициент в зависимости от формы движущегося тела. Этот вид сопротивления должен быть отнесен главным образом к сопротивлению инерции и лишь в незначительной степени к сопротивлению трения.
Сопротивления мы делим на полезную работу и на потери, подразумевая под полезной работой ту часть работы, которая идет исключительно на рабочий процесс, — например, поднятие груза, снятие стружки, прокатку железной болванки в фасонное железо, — т. е. полезная работа равна всей переданной матине работе минус потери всякого рода.
Чтобы покрыть все сопротивления, связанные как с полезной работой, так и с потерями, и сообщить ускорения подвижным массам системы в случаях, когда эти массы двигаются с переменными скоростями, необходимы двигательные силы. Таковые могут быть созданы всякого рода двигателями, начиная от нефтяных и кончая электрическими моторами.
Определение мощности, потребляемой системой мотор-машина. Чтобы привести в движение станок или машину, мотор должен развить определенный вращающий момент, причем величина этого момента зависит от указанных выше сопротивлений рабочей машины. Таким образом, рабочая машина определяет первый фактор мощности — размер вращающего момента мотора, а, следовательно, и силу, развиваемую на валу мотора. Второй фактор мощности — скорость привода, определяется уже свойствами мотора. В зависимости от рода мотора, будет ли он обладать характеристикой шунтовой или сериесной, определится соотношение между числом оборотов и вращающим моментом при данном числе оборотов.
Следовательно, задача определения мощности мотора сводится в первую очередь к определению сопротивлений, оказываемых рабочей машиной при приводе ее в движение; только определив эти сопротивления, можно подобрать мотор, способный развить на валу нужную силу для преодоления этих сопротивлений. На основании рабочего процесса машины можно выбрать тот или другой тип мотора. Зная силу и из характеристик данного мотора скорость v, соответствующую определенной нагрузке, можно найти величины S и v, как функции времени. Произведение обеих величин дает искомую кривую изменения мощности мотора во времени. После этого проверяется: превышает ли максимальный крутящий момент выбранного мотора максимальный нагрузочный момент машины или станка, в частности в отношении пускового момента, разовьет ли мотор нужную скорость в промежуток времени, допускаемый производством, а также не явится ли найденная мощность чересчур большой, а, следовательно, неэкономичной как по расходу энергии, так и в смысле первоначальных затрат, процентов на капитал и амортизацию. Окончательным контролем правильности выбранной мощности мотора является определение степени нагревания мотора во время работы в данных условиях нагрузки.
Для значительной части машин число оборотов является величиной постоянной и, следовательно, dv/dt равно нулю. Тогда уравнение
![]()
переходит в S = W, и динамическое сопротивление сказывается только при пуске в ход или останове мотора. Следовательно, мощность мотора будет выбрана в соответствии с статическими сопротивлениями, динамические сопротивления при пуске будут учтены при определении времени разбега мотора; таким образом задача для этой группы машин значительно упрощается: тип мотора выбирается с жесткой характеристикой.
При учете пускового периода или вообще всякого изменения скорости системы мотора-машины, решение уравнения ![]() аналитическим путем представляет в большинстве случаев значительные затруднения. Значительно проще оно решается графическим путем по способу пропорций (рис. 9).
аналитическим путем представляет в большинстве случаев значительные затруднения. Значительно проще оно решается графическим путем по способу пропорций (рис. 9).
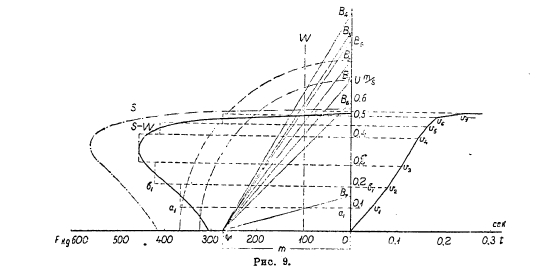
Рис. 9
Весь расчет идет следующим порядком. Определяются статические сопротивления, и выбирается предварительно мотор с определенной характеристикой, мощность которого достаточна для преодоления найденных сопротивлений. Механическая характеристика этого мотора известна, следовательно, из вышеуказанных пропорций и можно построить изменение скорости, как функцию времени. Для этого во 2-й четверти системы прямоугольных координат наносим W, S и S — W как функцию v откладывая по оси абсцисс указанные величины, а по оси ординат скорость v. Откладываем по оси абсцисс влево от начала координат значение «m». Кривые S и S — W переводим в ступенчатый вид при условии сохранения величины площадей, ими ограничиваемых. Высоты прямоугольников (S-W) откладываем по оси ординат и соединяем концы ординат с точкой М. Из начала координат проводим линию ОV1 параллельную лучу, выходящему из М к B1 через точки пересечения лучей с соответствующей линией а' а' проводим линию V1V2 параллельную лучу МВ2 до пересечения с линией b' b' и т. д.
Определив v, как функцию времени t, строим: диаграммы скорости, сопротивлений (статических и динамических), как сумму их — диаграмму усилий (тоже как функции времени) и, наконец, из диаграммы скорости v и усилий S определяем диаграмму мощности мотора как функцию времени, из которой определяем действительную мощность мотора как среднеквадратичную или эквивалентную мощность.
Понятие о среднеквадратичных токе, моменте и мощности и методы их определения. Электрическая энергия, подводимая к мотору, в своей большой части полезно используется в качестве механической энергии на валу мотора, в остальной части идет на покрытие потерь в самом моторе, вызывая нагрев мотора.
Потери в моторе разделяются на постоянные (в большей или меньшей степени), к которым относится трение в подшипниках, потери от токов Фуко и гистерезиса и т. д., и переменные — пропорциональные нагрузке на валу мотора. Величина потерь Q в ваттах-сек. определится как Q = P/η - Р. Различным нагрузкам P1, P2, P3,…, Pn будут соответствовать потери в моторе
![]()
вынося постоянные потери за знак суммы в правой и левой части и сокращая их в приведенном уравнении, мы сможем вместо Qпер подставить его выражение Qcер. = I2r, где r — сопротивление цепи якоря:
![]()
сокращая r в обеих частях равенства, имеем:
![]()
Полученное значение I называется среднеквадратичным, или эквивалентным, током и обозначается Iср. кв., или Іэкв.
Среднеквадратичное значение должно быть распространено и на моменты и мощность при меняющейся нагрузке. Однако, надо различить два случая; первый — для моторов с шунтовой характеристикой (шунтовые постоянного тока и асинхронные): вращающий момент М=С·I·Ф = C'·І, т. к. Ф — магнитный поток в магнитопроводе есть величина постоянная, если пренебречь реакцией якоря. Тогда умножив значение для среднеквадратичной тока на с', найдем:

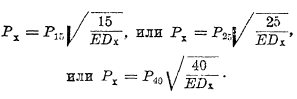
Поскольку для сериесного мотора момент М=с·І·Ф есть функция двух переменных — силы тока и величины магнитного потока, Mср.кв. указанным путем получен быть не может и при определении мощности мотора надо исходить из среднеквадратичной тока или из выражений среднеквадратичной мощности, т. к. Р = c·I·V; следовательно выражение для Icр.кв. умножаем на V и получаем
Для асинхронных моторов cos φ меняется с нагрузкой, и выражение Рср. кв. в случае, если сумма ∑t при малых нагрузках процентуально велика, получит значение, меньшее действительного. Это может быть компенсировано, если значения Р1, Р2, Р3.... брать не в киловаттах, а в киловольтамперах. ∑t=Т может охватывать не только рабочее время, но и время останова мотора: ∑t = ∑tраб. + ∑tпауз. = Т. В этом случае надо иметь ввиду, что условия охлаждения для вентилируемых моторов при останове ухудшаются. Это может быть учтено введением коэффициентов для времени работы двигателя с уменьшенной скоростью во время разбега и выбега: 0,5 — время останова мотора, 0,75 — время разбега мотора.
Вместо этого дифференцированного учета можно рекомендовать введение коэффициента 0,3 от времени паузы. В этом случае формула среднеквадратичной мощности выразится:
Из диаграмм мощности, моментов или токов определяется среднеквадратичная аналитическим путем, если закон изменения кривой известен, или графически; путем преобразования кривой в ступенчатую диаграмму (тогда расчет сводится к определению среднеквадратичных для прямоугольников, трапеций и треугольников). Среднеквадратичная для прямоугольника:
![]()
Среднеквадратичная для трапеции ограниченной ординатами Р2 и Р3:
Среднеквадратичная треугольника:
![]()
Влияние режима работы машины на выбранную мощность мотора. При выборе мотора по мощности необходимо учесть условия его работы — неполное использование во времени и недогрузку мотора. Мощность, определенная по сопротивлениям; может быть уменьшена в зависимости от того, работает ли мотор непрерывно или с остановами; с полной нагрузкой, из чего исходили при определении сопротивлений рабочей машины и подсчете мощности мотора, или нагрузка колеблется в больших или меньших пределах между полной нагрузкой и каким-то минимумом. Классифицируя характер нагрузки и режим работы, можно установить три основных группы с рядом подразделений в каждой группе.
I-ая группа — продолжительная работа при более или менее постоянной нагрузке; к этой группе откосится работа большинства станков металлообрабатывающих цехов, ткацких и прядильных фабрик, ремонтных мастерских, вентиляторов, молотилок, зерноочистительных машин, жмыхо-дробилок, силосорезок и т, д.
II-ая группа — кратковременная работа продолжительностью обычно несколько минут, после чего мотор находится в покое длительное время. Сюда относятся моторы для поднятия шандорных щитов на плотинах, для развертывания синхронных моторов, для включения реостата мотора при кнопочном управлении или управлении на расстоянии и т. п.
III-ья группа — повторно-кратковременная нагрузка, которую можно разбить на три основные подгруппы.
1) Повторно-кратковременная периодическая нагрузка, изменяющаяся по более или менее закономерно повторяющейся кривой (рис. 10). В более или менее чистом виде можно наблюдать такую нагрузку на прокатных станах или в прядильном деле на сельфакторах. Обычно диаграмма мощности носит сметанный характер, где на периодически повторяющуюся кривую накладываются колебания нагрузки в отдельных промежутках. Примером может служить диаграмма мощности мотора электропахотных агрегатов: прохождение борозды в одном направлении длится 4 минуты, останов мотора — 5 минут, т. е. время, необходимое для опрокидывания балансирного плуга и прохождения гона в обратном направлении тягой 2-го мотора. Нагрузка увеличивается по мере приближения плуга к лебедке вследствие увеличения диаметра намотки на барабан.
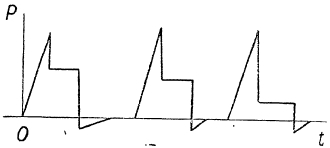
Рис. 10. Повторно-кратковременная периодическая нагрузка.
2) Повторно - кратковременная непериодическая нагрузка, где включение и выключение мотора следует через неравномерные промежутки времени при (почти) постоянной мощности. Наиболее яркий пример дает работа автоматической насосной станции.
3) Повторно-кратковременная непериодическая нагрузка, переменная по величине (рис. 11). К этой группе относятся моторы, приводящие в движение лебедки, электрические кошки, всякого рода крановые моторы.
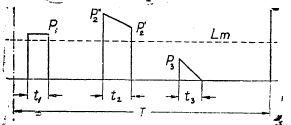
Рис. 11. Повторно-кратковременная непериодическая нагрузка.
Зная влияние перечисленных основных видов режима работы мотора на величину его мощности, во всех смешанных случаях будет нетрудно скомбинировать соответствующий способ расчета.
І-ая группа — постоянная нагрузка при постоянной скорости. В этом случае моторные силы определяются статическими сопротивлениями или сопротивлением жидкой или газовой среды. Мощность мотора, определенная вышеперечисленными способами, Р=S·v/102η кВт, не требует поправок со стороны режима работы, т. к. он остается почти постоянным во все время работы мотора. В этом случае, на основе определенной мощности и числа оборотов, заданного рабочей машиной, дальнейшая задача сводится к подбору по каталогам подходящего мотора и проверки на пусковой момент.
II группа — кратковременная нагрузка. В большинстве случаев достаточно проверить определенную из сопротивлений системы мощность только на максимальный крутящий момент. Все остальные проверки отпадают, и мотор выбирается из специальных моторов, строящихся для временной мощности.
Правила и нормы ІХ-го Всесоюзного электротехнического съезда предусматривают стандартные промежутки времени работы моторов для кратковременного режима в 5, 10, 15, 30, 60, 90 и 120 минут. На табличном щитке мотора указывается мощность и продолжительность периода — это значит, что мотор должен отдать номинальную мощность в течение указанного периода без перегрева свыше норм. Следовательно, если кратковременная нагрузка длится 5 или свыше 5 минут, выбор мотора в соответствии с величиной вращающего момента может быть сделан из типовых моторов.
III группа — 1-ая подгруппа. Мотор для одиночного привода работает в условиях нагрузки, периодически повторяющейся по определенной кривой. Определение мощности производится вышеуказанным способом как среднеквадратичной.
2- ая подгруппа включения мотора непериодична, но нагрузка постоянна по величине.
В этом случае, как и в предыдущем, мощность мотора, определенная выше, должна быть уменьшена. Ее величина определяется по той же формуле, как среднеквадратичная:
 , т. е. найденная выше мощность может быть уменьшена на величину квадратного корня из ε или ED, т. е. из отношения рабочего времени ко всему периоду работы мотора. Эта формула исходит из предположения, что процесс нагревания и охлаждения идентичен, что имеет место для открытых и закрытых моторов без вентиляции; для моторов закрытых с вентиляцией процесс охлаждения во время пауз идет медленнее, чем нагрев в рабочие промежутки, и полученная повторная кратковременная мощность будет несколько меньше действительной.
, т. е. найденная выше мощность может быть уменьшена на величину квадратного корня из ε или ED, т. е. из отношения рабочего времени ко всему периоду работы мотора. Эта формула исходит из предположения, что процесс нагревания и охлаждения идентичен, что имеет место для открытых и закрытых моторов без вентиляции; для моторов закрытых с вентиляцией процесс охлаждения во время пауз идет медленнее, чем нагрев в рабочие промежутки, и полученная повторная кратковременная мощность будет несколько меньше действительной.
3-я подгруппа. Нагрузка непериодическая, переменная по величине и недостаточно определенная; во многих случаях работы мотора в условиях такой «перемежающейся» нагрузки включение мотора происходит нерегулярно, как, например, работа крановых моторов для подъема тяжестей, особенно в литейных и в ремонтных мастерских, или работа лебедок для уборки кормов, следовательно — построение рабочих диаграмм невозможно. Снятые с натуры диаграммы в течение ряда промежутков времени различны между собой и не могут быть положены в основу для определения средней квадратичной мощности. В этих случаях метод точного расчета мощности мотора должен быть заменен методом установления известных предельных величин, на основании которых и выбирается мотор. Этими величинами являются ED (относительная продолжительность включения) и коэффициент относительной нагрузки Котн. нагр. Они получаются путем статистики или хронометража на аналогичных производствах или определяются путем расчета:
![]()
Заводы строят моторы так называемого кранового типа на три режима работы: ED% = 15%, ED%=25% и ED%=40%. Это значит, что мощность мотора, обозначенная на его щитке, в течение каждых десяти минут может быть использована соответственно 1,5; 2,5 и 4 минуты или при шести циклах в час — 9, 15 и 24 минуты. Если число включений в час значительно более шести, это должно быть учтено. Частое включение мотора при значительном начальном моменте дает добавочно нагрузку мотора, вызываемую ускорением масс системы до полной скорости, и требует увеличения выбранной мощности мотора. В некоторых случаях к мощности ускорения должна быть добавлена мощность торможения, если повторяющиеся остановки мотора должны происходить в заранее заданное время, меньшее времени его естественной остановки.
Частота включений в час определяется для данного случая из производственных заданий или из средних статистических данных для наиболее характерных условий работы, а именно:
h час = 100 — 120 для кранов мастерских
« = 150 — 200 « « литейных
« = 800 — 400 « « в металлургическом производстве.
« = 600 —1 000 для моторов в прокатном деле.
Зная число включений в час, отношение начального момента к рабочему и характеристику мотора, вычислив ED%, можно определить полную мощность мотора, включая увеличение ее на ускорение по следующей формуле:
![]()
где hчас. число включений в час, t уск. — время разбега системы мотор-машина с момента запуска до полного числа оборотов, р — отношение пускового момента к номинальному.
Кроме неполного использования времени работы мотора, учитываемого ED, есть другое обстоятельство, которое позволяет еще уменьшить мощность мотора — это неполная нагрузка мотора, учитываемая особым коэффициентом, характеризующим степень колебания нагрузки:
![]()
где Mmin и Mmax — вращающие моменты соответственно-минимальной и максимальной нагрузки. Значения для Кот.нагр. колеблется от 0,5 до 1. Электромашиностроительные заводы дают в каталогах специальную таблицу, позволяющую найти более удлиненное ЕD при более малой нагрузке и соответственно уменьшить мощность мотора для фактической ЕD по формулам:
Определение мощности мотора группового привода. Групповой привод может применяться лишь на сравнительно коротких трансмиссиях при следующих условиях: 1) коэффициент использования машин, работающих от трансмиссии, достаточно высок, т. е. простой машин не велик; 2) рабочие машины однотипны; 3) мощности машин не велики (ориентировочно в пределах 3-4 кВт); 4) отсутствие необходимости регулировки числа оборотов отдельных машин; 5) наличие больших пусковых моментов машин, значительно превышающих пусковой момент мотора, что, например, имеет место в центрифугах. В последнем случае мощность отдельных машин может быть выше 3—4 кВт.
Степень использования мотора зависит от естественного простоя станков, обусловленного ходом производства, и случайного простоя. При большом количестве станков этот простой остается в известных стабильных границах по закону больших чисел и учитывается так называемым «коэффициентом использования»
![]()
Кисп. может быть вычислен теоретически; например, Сименс дает следующий способ вычисления степени использования ткацкого станка: теоретическое число ударов батана в минуту 68, или в неделю — 10·6·60·68 = 244 800; фактическое число ударов за неделю колеблется (в зависимости от индивидуальных свойств ткача) от 140 000 до 160 000, тогда:
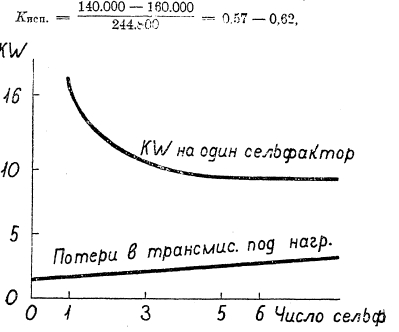
т. е., ткацкий станок фактически используется полностью только в течение около 5 часов за 8-ми часовой рабочий день. Кисп. Аналогично понятию ED%.
Продолжая аналогию со вторым случаем определения мощности мотора, мы видим, как колебания в нагрузке, играющие огромную роль для одиночного привода, выравниваются с переходом к групповому приводу. Это особенно четко видно из кривой потребления мощности на один сельфактор (черт. 12). Достаточно 6-ти сельфакторов на привод, чтобы мощность на один сельфактор превратилась в величину постоянную, но почти в 2 раза меньшую против мощности мотора одиночного привода. Из этого примера следует, что мощность каждого станка, определяемая средней квадратичной, имеет тенденцию к увеличению в соответствии с максимальным крутящим моментом. При наличии резких пиков в рабочей диаграмме от отдельной машины величина этих пиков сглаживается с переходом от одиночного к групповому приводу; отсюда также видно, что простое суммирование мощности отдельных станков приведет к преувеличенной мощности мотора группового привода. Теоретические изменения в результирующей диаграмме нагрузок отдельных станков выразятся в отношении суммы нагрузок за рабочий период, умноженных на соответствующий промежуток времени, к сумме мощностей отдельных станков, умноженных на время всего рабочего периода:
![]()
где
![]()
и n – число станков.
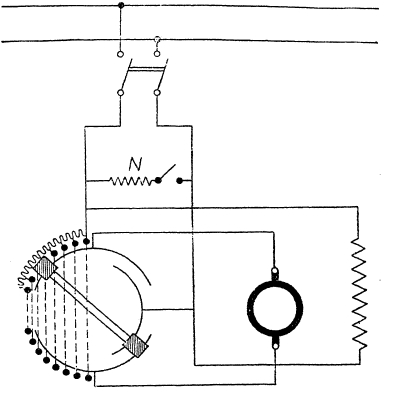
Рис. 13. Резервная схема включения шунтового мотора с добавочным сопротивлением.
Мощность мотора, работающего на привод, выразятся:
![]()
Правильное включение и выключение моторов обеспечивает обмотки моторов и других находящихся в цепи аппаратов от пробоя изоляции и выхода из работы. В основе лежат нестационарные процессы, связанные с включением и выключением электрической цепи, практическим выводом из которых являются следующие правила: обмотки возбуждения шунтового мотора в реверсивной схеме могут оставаться разомкнутыми (см. рис. 13); тогда при отключении мотора от сети возникают перенапряжения Епер. в катушках возбуждения, опасные для изоляции. Во избежание этого включается параллельно с обмоткой возбуждения добавочное сопротивление, приблизительно в 5—6 раз большее, чем сопротивление обмоток возбуждения. Аналогичное сопротивление включается параллельно обмоткам возбуждения для сериесного мотора с тем лишь видоизменением, что это сопротивление намотано на железный сердечник.
Выключение асинхронных моторов не должно происходить при открытом роторе; последний должен быть замкнут на некоторое сопротивление, определяемое из формулы
![]() где R — требуемое сопротивление, Еном — напряжение сети, L — коэффициент самоиндукции ротора и ω — угловая скорость. Включение асинхронного мотора желательно делать тоже при замкнутом роторе, т. к. максимальное значение тока включения в этом случае в более короткий срок понижается до нормального. Это обстоятельство важно для уменьшения нагрева мотора и питающего трансформатора.
где R — требуемое сопротивление, Еном — напряжение сети, L — коэффициент самоиндукции ротора и ω — угловая скорость. Включение асинхронного мотора желательно делать тоже при замкнутом роторе, т. к. максимальное значение тока включения в этом случае в более короткий срок понижается до нормального. Это обстоятельство важно для уменьшения нагрева мотора и питающего трансформатора.
Время разбега мотора определяется из уравнения, связывающего моменты, действующие в системе мотор-машина:
![]()
где Ммот. — вращающий момент мотора пусковой или максимальный, Мприв. — приведенный статический момент машины, как результат сопротивления машины, Θ — момент инерции всей системы. Система придет в движение при включении мотора, если Ммот. > Мприв., т. е., если имеется избыточный момент Мизб. Тогда уравнение имеет вид:
![]()
Удерживая Мизб. постоянным путем регулировки пускового тока реостатом, выносим Мизб. за знак интеграла и получаем tразб=Θω/Мизб. Подставив вместо Θ его выражение через маховой момент GD2/4g и для ω=2πn/60, получим
![]()
где n - число оборотов мотора, D — диаметр инерции вращающейся системы, G — вес всех вращающихся масс в кг, g — земное ускорение, равное 9,81 м/сек. GD2 измеряется в кгм2. Если в системе имеются массы, вращающиеся с другим числом оборотов, и прямолинейно движущиеся массы (например мотор с числом оборотов n мин. через зубчатку с числом оборотов n1 поднимает груз Q кг со скоростью v м/сек.), то все должно быть приведено к числу оборотов мотора и одному из видов движения, например вращающемуся; тогда:

Для короткозамкнутых моторов, где разбег происходит под влиянием постоянно убывающего момента, время t разб. нужно увеличить вдвое. Mнагр. заменяют номинальным моментом мотора, т. к. при правильно выбранном моторе они должны быть равны.
Зная время разбега и принимая движение равномерно ускоренным, можно проверить мощность мотора, выбранную на основе статических сопротивлений, с учетом динамических сопротивлений, по формуле:

где Vмин. — скорость подымаемого груза выражается в минутах, а сам груз Qтн. — в тоннах.
Правильность выбранного мотора окончательно проверяется по степени нагрева последнего. Потери энергии в моторе (Q) за определенный промежуток времени повышают температуру мотора до тех пор, пока не будет покрыта теплоемкость С мотора и не установится равновесие между генерируемым теплом Q и теплоотдачей мотора. Fα (t—t0) = Аτ. Тепловой баланс выразится уравнением: Qdt = Cdτ + Aτdt; решая это уравнение, находим закон, по которому нарастает сверхтемпература мотора:
![]()
где максимальная температура мотора (сверх окружающей среды) соответственно с нагрузкой Р равна τмах = Q/A, т. е. зависит только от теплоотдачи и величины нагрузки мотора, т. к. Q = f(Р), Т называется «постоянной времени нагрева» мотора; Т = С/А сек., через время работы t = ЗТ мотор достигает 95% от максимальной сверхтемпературы τмах, т. е. τ = 0, τмах. Взяв первую производную от выражения для τ, получим при t = 0 tg α = τмах/T = Q/C, т. е. вид кривых на рис. 14 зависит от нагрузки и от теплоемкости: чем больше теплоемкость, тем положе пробегает кривая для данного Q.
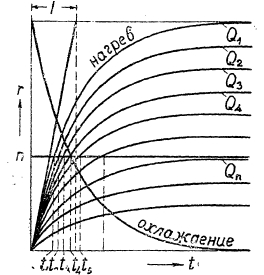
Рис. 14. Кривые нагрева мотора при различных нагрузках.
Зная А и Т по заводским данным, можно определить температуру для любой нагрузки (рис. 14). Если мотор работает в условиях повторно-кратковременной периодической нагрузки, при каком-то ED = ε, то максимальная температура выразится:
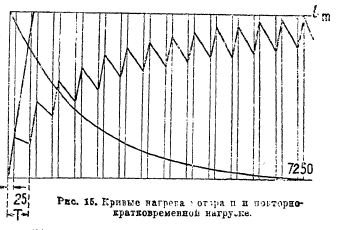
Рис. 15. Кривые нагрева мотора при повторно-кратковременной нагрузке.
где а — сумма рабочего времени, b — паузы, а Т — постоянная времени нагрева в сек., минутах или часах (рис. 15).
Выбор реостата определяется также условиями работы и тяжестью пуска. Если мотор включается вхолостую или с малой начальной нагрузкой тока типа вентиляторной, реостат может быть выбран на половинную нагрузку, во всех остальных случаях реостат выбирается на полную нагрузку. Для регулировки числа оборотов строятся специальные мощные, т. н. регулировочные, реостаты. Стандартные реостаты рассчитаны на небольшое число пусков в час (z) и на малое количество последующих один за другим запусков (fn —частота включения); для пуска реостатов с воздушным охлаждением fn = 4—2; с масляным охлаждением fn = 10—3. В условиях повторно-кратковременной работы условия работы реостата утяжеляются, т. к. число и частота запусков растут. Если число включений переходит 10—15 в час, от типа реостатов с плоскими скользящими контактами переходят к контроллерам барабанного типа. При числе включений свыше 120 в час употребляются вальковые контролеры, или контакторы, включаемые не от руки, а с помощью специальных электромагнитов.
Знание Т — постоянной времени нагрева и закона изменения температуры мотора позволяет определять перегрузочную способность мотора в различных условиях нагрузки. Способность к перегрузке при продолжительной работе устанавливается нормами ВЭС, а именно: мотор должен выдерживать увеличение силы тока на 50% в течение 2 минут после того, как мотор достиг стационарного теплового состояния. В условиях кратковременной нагрузки перегрузочная способность мотора  , где а – продолжительность работы мотора при данной перегрузке без вредного перегрева. Если перегрузочная способность известна, то
, где а – продолжительность работы мотора при данной перегрузке без вредного перегрева. Если перегрузочная способность известна, то
![]()
Построив кривую зависимости ртер. от а/Т, получим логарифмику, которая дает возможность, зная Т, для любого мотора определить способность к перегрузке за любой промежуток времени. При повторно кратковременной периодической нагрузке
Давая параметру а/Т различные значения от 0 до ∞ получим (Oelschläger) пучок т. н. кривых Эльшлегера, позволяющий, так же как логарифмика, определить перегрузку для любого ED (относительная продолжительность включения мотора). Если постоянные времени нагрева Т и охлаждения Т0 различны, то вместо ЕD берется
![]()
продолжительность работы мотора при различных нагрузках может быть определена из чер. 14 — прямая (асимптота), проведенная на высоте τmax параллельно оси абсцисс, отсечет на пучке кривых отрезки t1, t2, t3.., соответствующие промежуткам времени работы мотора при перегрузках Q1, Q2, Q3..; способность к тепловой перегрузке Ртер. можно легко связать с рмех — механической способностью к перегрузке, если пренебречь постоянными потерями:
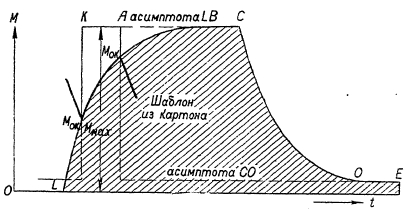
Рис. 16
Для проверки мотора на нагрев для любой диаграммы нагрузок пользуются графическим методом с помощью шаблона (рис. 16). Зная Т, строят шаблон для t=4T. Преобразовав диаграмму в ступенчатую, для каждой нагрузки строят асимптоту. Шаблон прикладывается к асимптоте по линии LB и передвигается, пока его кривая не пересечет начальную для данной ступени сверхтемпературу, т. е., конец координаты τ, а для начала кривой – начало координат.
Литература: A. Schwaiger, “Electromotorische Betriebe” (1922); C. Schiebeler, “Electromotoren für aussotzenden Betrieb” (1926, есть русский перевод); Gordon Fox, “Principles of Electric motors and control” (1923); Liwschitz, M., “Berechnung der Aussetzleistungen” (E. T. Z., 1926, стр. 1345 сл.); СЭТ, т. VI, отд. 22-24 (1929); R. Rüdenberg, «Eleetrische Schaltvorgänge» (1923, перевод на русский язык); академик К. И. Шенфер, «Коллекторные двигатели переменного тока»; профессор В. К. Попов, «Применение электродвигателей в промышленности» (ч. I — 1912 и ч. II — 1935); А. Е. G. «Электричество как источник силы и света» («Бият», 1923); Гордон Фокс, «Практика электрического привода» (1934); профессор Ж. Г. Евреинов, «Электропривод» (т. I: «Электрификация сельского хозяйства», 1933); инженер И. И. Дорофеев и С. П. Зефиров, «Электрификация исполнительных механизмов» (1935); профессор В. С. Кулебакин, «Пусковые и регулирующие реостаты» (1923).
М. Евреинов.
| Номер тома | 53 |
| Номер (-а) страницы | 50 |